8.10.0
Major Features
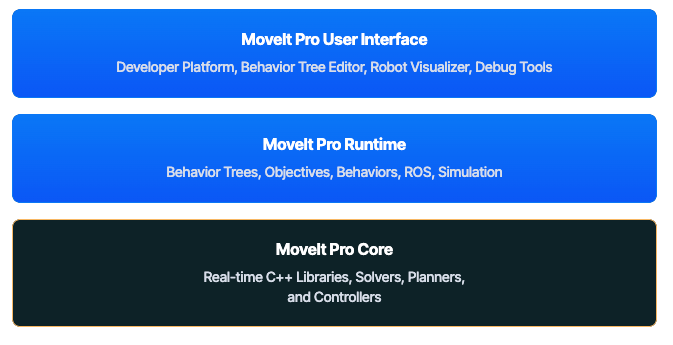
MoveIt Pro Core

A new sub-product is now available (additional costs apply) that exposes the core MoveIt Pro planners, solvers, and controllers with low-level C++ and Python APIs. It does not include Behavior Trees nor much of the rest of MoveIt Pro's capabilities. Learn more..
Behavior Tree Editor Sync with IDE
Now when you edit a Behavior Tree XML file in your IDE / text editor of choice, the changes are automatically refreshed in the MoveIt Pro UI.
URDF to MJCF Converter
The urdf_to_mjcf was not previously announced, but helps convert between the different robot model types. In this update the script has been enhanced to automatically balance URDF inertia matrices that are not positive definite.
Enhanced Segment Anything Model Support
The new Behavior GetMasks2DAutomask uses the SAM2 model to automatically segment images using a grid of points as prompts.
New ExecuteMTCSolution Behavior
Added a new Behavior ExecuteMTCSolution to execute a pre-computed MTC solution trajectory on a robot. This Behavior will replace the existing ExecuteMTCTask Behavior, as we advance towards a leaner execution pipeline.
ExecuteMTCSolution offers two controller interfaces: one for standard 'FollowJointTrajectory' controllers (e.g. ros2_control JTC), and another for the Joint Trajectory Admittance Controller (JTAC) included in MoveIt Pro.
This allows users to easily execute MTC solutions with or without admittance control, and simplifies integration with other vendor controllers different than the ros2_control JTC, but offering the same FollowJointTrajectory action interface.
Other Enhancements
Misc UI Changes
- Added new multi step modal for splitting workflows into distinct steps for the Custom Behavior Creation flow.
Reference Application Changes
- Franka Robotics dual arm model URDFs updated
Documentation Improvements
- Improvements to Configure ROS 2 DDS documentation updating our recommendation for "dual computer" configurations.
Other Improvements
- The TF2 utility
tf2-toolsis now automatically installed and available in the MoveIt Pro container. - Enables graph optimization for ONNX runtime, increasing ML inference performance
- Model predictive control functionality now has sphere residuals and associated Behavior for the residual.
- Updated NVIDIA driver version recommendations to >= 525 and < 580
- The Behavior Tree Assistant LLM models have been upgraded to Claude Opus 4.5, Gemini 3 Pro, and GPT-5.1 Codex.
- Various license check and security improvements.
Bug Fixes
- Fixed an issue where tight tolerances in ProRRT orientation constraints caused a misleading error message.
- Joint-space planning Behaviors (such as
PlanToJointGoal) will now properly report when goal states are outside of the given orientation tolerance. - Alert Sidebar logs each Objective run, even if there's no alerts
- Waypoint manager node no longer fails to start when the waypoints YAML file is empty
- Fixed a bug where the MTC Debugger in the UI will crash when opened.
- Fixed a bug in the
AddVirtualObjectToPlanningSceneBehavior where virtual objects were incorrectly set to allow collisions with all other objects by default.