8.6.0
· 4 min read
Major Features
Training Data Collection with Meta Quest
MoveIt Pro can now collect teleoperation data using the Meta Quest. Check out the Hardware Guide.

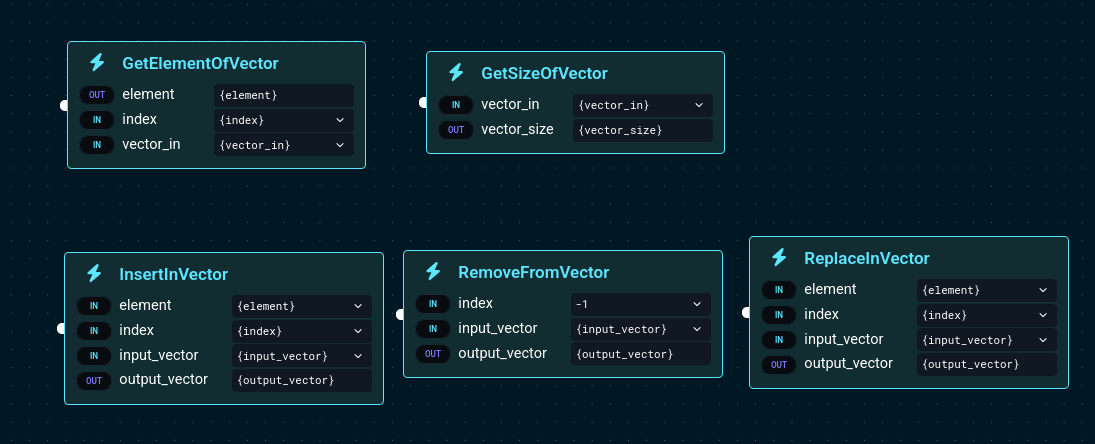
Improved Vector Operations
Added general vector operations that work on vectors on the blackboard of any type, including GetElementOfVector, GetSizeOfVector, InsertInVector, RemoveFromVector, ReplaceInVector, add ResetVector Behaviors. Uses type BT::Any.
Create New Objectives & Behaviors Easier
It's now easier to access the popup forms for new Behaviors and Objectives, with a combined "+" button accessible from both sidebar modes.
UI Changes
- The UI now remembers your preferences on showing and hiding the URDF and point cloud between tabs in Pro and in your browser.
- Improved the "New Objective" form to display the target location for the new Objective.
- Added descriptions for plugin types in the "New Custom Behavior" form
- Added an "About MoveIt Pro" popup modal to declutter the settings dropdown menu and provide a centralized location for company and product information.
- Hide right connector dot in collapsed Behavior Tree subtree nodes
- Added a Favorites section to the Objective sidebar to allow more favorites to be displayed without getting cut-off.
- Added placeholder examples for vector input fields in Behavior Tree port editing
Enhancements
- MTC Tasks can now be initialized with a timeout parameter to control the execution time of the task.
Behavior Changes
InitializeMTCTasknow accepts atimeoutparameter to set an overall timeout for the MTC Task, in seconds. This is useful for ensuring that the MTC Task does not run indefinitely and can be used to control the execution time of the task.- Renamed Tool behaviors to more general URDF behaviors:
AddTool→AddURDF(deprecatedAddToolstill available)AttachTool→AttachURDF(deprecatedAttachToolstill available)DetachTool→DetachURDF(deprecatedDetachToolstill available)RemoveToolFromScene→RemoveURDFFromScene(deprecatedRemoveToolFromScenestill available)
- Added URDF/XACRO file validation in
AddURDFbehavior
Internal API Changes
- Renamed
ToolChangingCapabilitytoURDFPlanningSceneCapability - Renamed ROS service messages:
moveit_studio_agent_msgs/srv/AddTool→moveit_studio_agent_msgs/srv/AddURDFmoveit_studio_agent_msgs/srv/AttachTool→moveit_studio_agent_msgs/srv/AttachURDFmoveit_studio_agent_msgs/srv/DetachOrRemoveTool→moveit_studio_agent_msgs/srv/DetachOrRemoveURDF
- Updated service names:
add_tool_to_scene→add_urdf_to_sceneattach_tool→attach_urdfdetach_tool→detach_urdfremove_tool_from_scene→remove_urdf_from_scene
- Updated service field names:
tool_name→urdf_nametool_urdf→urdf_stringtool_pose→urdf_pose
Documentation Improvements
- Added comprehensive Doxygen documentation for the PlanningSceneMonitor class, providing detailed technical reference for developers integrating with MoveIt Pro's planning scene monitoring capabilities.
- Added comprehensive config.yaml reference guide that documents all available configuration options, including hardware, moveit_params, ros2_control, objectives, and ros_global_params sections with detailed examples and validation rules.
- Simplified Franka Research 3 (FR3) Hardware Setup Guide.
Bug Fixes
- Fixes issue where two markers overlapping each other would move both on drag. Now only moves the one closest to camera
- Fixes issue where the "View" select button in the Visualization pane could sometimes overflow and be cut off
- Fixed an issue where toast notifications that were hidden by log level rules took up vertical space in the toast container despite being invisible
- Fixed an issue that can cause RetrieveWaypoint to time out
- Fixed an issue where waypoints named with just a number (for instance "11") would cause a crash.
- Fixed objective creation to use the last entry in
objective_library_pathsfrom the config.yaml for saving new objectives, allowing flexible configuration of where objectives are stored. - Fixed an issue where velocity scale was not being applied in GeneratePointToPointTrajectory.
- Fixed a bug where the RetrieveJointStateParameter behavior would persist state between runs, possibly causing stale data to be retrieved.
- Fixes bug where top bar navigation could be pushed out of view
- Fixes bug where heartbeat topic would slow when working with larger behavior trees