Parallel Motion Planning
Parallel planning can be incredibly useful to decrease cycle times while executing previously decided motion plans. MoveIt Pro supports parallel planning via the Parallel node to execute part of the Behavior Tree at the same time as another.
The Parallel node is concurrent allowing for simultaneous execution of multiple tasks.
The general pattern utilized for parallel planning during execution looks like the following:
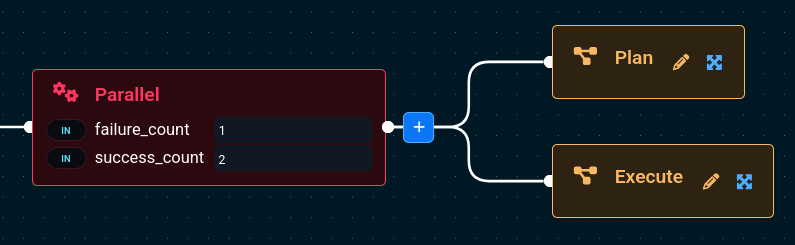
The Parallel node accepts failure_count and success_count parameters that determine how many child nodes must fail or succeed for the parallel execution to be considered failed or successful. For motion planning and execution, we recommend setting failure_count to 1 (allowing only one child to fail) and success_count to match the total number of immediate children (2 in this example).