Model Predictive Control (MPC)
Model Predictive Control (MPC) is a powerful technique for optimizing robot motion in real-time by solving an optimization problem over a prediction horizon. MoveIt Pro provides a framework for creating custom MPC Behaviors that can optimize multiple goals simultaneously through residual functions.
This how-to guide demonstrates how to create a custom MPC Behavior for a pose tracking application as well as a custom residual function to penalize joint motion.
This is an advanced topic and will likely require integration support from PickNik engineers.
This is experimental and only guaranteed to work in simulation for now. Use caution when testing on hardware.
Overview
MPC in MoveIt Pro uses MuJoCo for physics simulation and optimization. The optimization problem aims to minimize a weighted sum of residuals. In this implementation, residuals are used to represent the error which is minimized through a gradient descent optimization function.
For more information please reference the paper and the code that our MoveIt Pro MPC implementation is based on: "Predictive Sampling: Real-time Behavior Synthesis with MuJoCo", mujoco_mpc.
Prerequisites
Before creating custom MPC Behaviors, ensure that:
- Your robot configuration package has a MuJoCo model configured (
.xmlfile) - You are familiar with creating custom Behaviors
Creating a Simplified MuJoCo Model
While MPC can technically be performed using any MuJoCo scene as the model, it is highly recommended to create a simplified MuJoCo model to improve optimization speed. This can be built from scratch, or by starting from an existing MuJoCo .xml scene and removing all unnecessary elements. This model should typically be limited to only the robot kinematics. As an example, here is the simplified lab_sim MuJoCo model used for the Behaviors in this document. (As compared to the full lab_sim scene).
Creating a Custom MPC Behavior
An MPC Behavior inherits from MPCBehaviorBase and defines the set of residual functions it will optimize. Here's how to create one:
Step 1: Create a custom behavior from the UI
Set the Behavior Name to "custom_mpc_behavior", the Behavior Type to "SyncActionNodeWithSharedResources" for realtime control, and the Description to "My custom MPC Behavior."
This will create a ROS2 package with the following structure
custom_mpc_behavior
├── behavior_plugin.yaml
├── CMakeLists.txt
├── custom_mpc_behavior_plugin_description.xml
├── include
│ └── custom_mpc_behavior
│ └── custom_mpc_behavior.hpp
├── package.xml
├── src
│ ├── custom_mpc_behavior.cpp
│ └── register_behaviors.cpp
└── test
├── CMakeLists.txt
└── test_behavior_plugins.cpp
Step 2: Overwrite the Header File
Overwrite the custom_mpc_behavior.hpp header file with the following contents:
#pragma once
#include "moveit_pro_mpc/residual_functions/joint_acceleration.hpp"
#include "moveit_pro_mpc/residual_functions/joint_velocity.hpp"
#include "moveit_pro_mpc/residual_functions/site_tracking.hpp"
#include "moveit_pro_behavior_interface/mpc_behavior_base.hpp"
// Include other residual function headers as needed
namespace custom_mpc_behavior
{
/**
* @brief Custom MPC Behavior for tracking a target pose.
*
* This behavior uses Model Predictive Control to track a target pose
* while optimizing for smooth motion and respecting joint limits.
*/
class CustomMpcBehavior : public moveit_pro::behaviors::MPCBehaviorBase<CustomMpcBehavior>
{
public:
CustomMpcBehavior(const std::string& name, const BT::NodeConfiguration& config,
const std::shared_ptr<moveit_pro::behaviors::BehaviorContext>& shared_resources);
static BT::PortsList providedPorts();
/**
* @brief Define the residuals used by this MPC behavior.
* @return A tuple of name-residual pairs.
*/
static auto getResiduals()
{
return std::make_tuple(std::make_pair("site_tracking", moveit_pro_mpc::SiteTrackingResidualFunction()),
std::make_pair("velocity", moveit_pro_mpc::VelocityResidualFunction()),
std::make_pair("acceleration", moveit_pro_mpc::AccelerationResidualFunction()));
}
static BT::KeyValueVector metadata();
};
} // namespace custom_mpc_behavior
The key component is the getResiduals() method, which returns a tuple of string-residual pairs. Each pair consists of:
- A name for the residual (used to create Behavior Tree ports)
- An instance of the residual function
For this example we will be incorporating three residual functions:
- A site tracking residual to minimize the distance between the end effector pose and an arbitrary pose we wish to track.
- A velocity residual to limit the velocity of the robot joints.
- An acceleration residual to limit the acceleration of the robot joints.
Step 3: Overwrite the Implementation File
Overwrite the corresponding custom_mpc_behavior.cpp file with the following contents:
#include "custom_mpc_behavior/custom_mpc_behavior.hpp"
#include "moveit_pro_behavior_interface/metadata_fields.hpp"
namespace
{
inline constexpr auto kDescription =
"Custom MPC Behavior that tracks a target pose while optimizing for smooth motion.";
}
namespace custom_mpc_behavior
{
CustomMpcBehavior::CustomMpcBehavior(const std::string& name, const BT::NodeConfiguration& config,
const std::shared_ptr<moveit_pro::behaviors::BehaviorContext>& shared_resources)
: MPCBehaviorBase(name, config, shared_resources)
{
}
BT::PortsList CustomMpcBehavior::providedPorts()
{
return moveit_pro::behaviors::MPCBehaviorBase<CustomMpcBehavior>::providedPorts();
}
BT::KeyValueVector CustomMpcBehavior::metadata()
{
return { { moveit_pro::behaviors::kSubcategoryMetadataKey, "Motion - Execute" },
{ moveit_pro::behaviors::kDescriptionMetadataKey, kDescription } };
}
} // namespace custom_mpc_behavior
Step 4: Build Your Package
Build your user workspace:
moveit_pro build user_workspace
Step 5: Create an Objective Using Your New Custom Behavior
Launch MoveIt Pro using:
moveit_pro run -c lab_sim
Additional example MPC Objectives can be found in the side bar under the heading "Applications - MPC Examples"
Duplicate the "MPC Pose Tracking" Objective as a starting point for the new "Custom MPC Pose Tracking" Objective:
![]()
Replace the "MPCPoseTracking" Behavior with the new "CustomMpcBehavior" so the Behavior Tree beneath the "Parallel" node looks like the following:
![]()
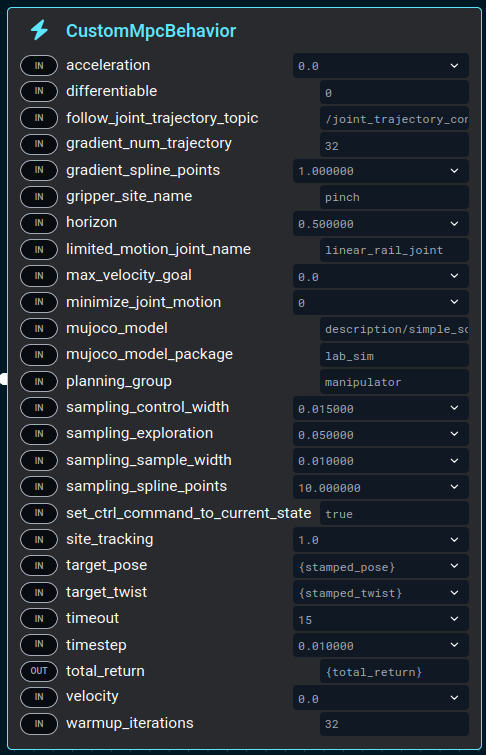
Update the following ports in "CustomMpcBehavior":
- Set the
accelerationweight to0. - Set the
gripper_site_nameparameter topinch. - Set the
max_velocity_goalparameter to0. - Set
mujoco_modeltodescription/simple_scene.xml. - Set
mujoco_model_packagetolab_sim. - Set the
site_trackingweight to1.0. - Set
target_poseto{pose_stamped}. - Set
target_twistto{stamped_twist}. - Set the
velocityweight to0.
The ports should look like the following:
Run the "Custom MPC Pose Tracking" Objective, the end effector should track the moving site, but it might overshoot a little initially because it is moving so quickly.
Change the weight on the velocity residual to 0.1 and run the Objective again. Notice how this causes the robot to
slow down and not overshoot as much, but it also means the robot cannot keep up as well with the pose. Reset the
velocity weight to 0.0 before moving on.
Creating a Custom Residual Function
Residual functions define the optimization goals. Here's how to create a custom residual function that minimizes the motion of a specific joint in the robot model.
Step 1: Create the Header File
Create minimize_joint_motion_residual.hpp in the custom_mpc_behavior/include/custom_mpc_behavior directory:
#pragma once
#include "moveit_pro_mpc/residual_functions/residual_function_interface.hpp"
#include "mujoco/mjdata.h"
#include "mujoco/mjmodel.h"
#include "tl_expected/expected.hpp"
namespace custom_residuals
{
/**
* @brief Custom residual function for minimizing motion of a joint.
*
* This residual penalizes any motion of a specified joint from its initial value.
* Useful for keeping specific joints stationary during motion.
*/
class MinimizeJointMotionResidualFunction final : public moveit_pro_mpc::ResidualFunctionInterface
{
public:
/**
* @brief Get the number of dimensions for this residual.
* @return Number of dimensions (1 for a single joint value).
*/
[[nodiscard]] int getNumDims() const override
{
return 1;
}
/**
* @brief Validate residual parameters and save initial joint value.
* @return Success or error message.
*/
tl::expected<bool, std::string> validateResidualParameters() override;
/**
* @brief Apply the residual function to compute motion from initial joint value.
* @param model The MuJoCo model.
* @param data The MuJoCo data at the current timestep.
* @param residual Output array for residual values.
*/
void applyResidual(const mjModel& model, const mjData& data, double* residual) const override;
/**
* @brief Define parameters that can be set from Behavior Tree ports.
* @return Tuple of parameter name-pointer pairs.
*/
[[nodiscard]] auto getResidualParameters()
{
return std::make_tuple(std::make_pair("limited_motion_joint_name", &joint_name_));
}
private:
/** @brief Name of the joint in the MuJoCo model whose motion should be minimized. */
std::string joint_name_;
/** @brief Index of the joint in the MuJoCo model (cached during validation). */
int joint_index_ = -1;
/** @brief Initial value of the joint (saved during validation). */
mjtNum initial_joint_value_ = 0.0;
};
} // namespace custom_residuals
Step 2: Implement the Residual Function
Create minimize_joint_motion_residual.cpp in the custom_mpc_behavior/src directory:
#include "custom_mpc_behavior/minimize_joint_motion_residual.hpp"
#include "fmt/format.h"
#include "mujoco/mujoco.h"
namespace custom_residuals
{
tl::expected<bool, std::string> MinimizeJointMotionResidualFunction::validateResidualParameters()
{
// Look up the joint by name in the MuJoCo model
joint_index_ = mj_name2id(model, mjOBJ_JOINT, joint_name_.c_str());
if (joint_index_ == -1)
{
return tl::make_unexpected(fmt::format("Joint '{}' does not exist in the MuJoCo model.", joint_name_));
}
// Save the initial value of the joint from initial_data
// Get the joint address in qpos (joint position data)
int qpos_addr = model->jnt_qposadr[joint_index_];
initial_joint_value_ = initial_data->qpos[qpos_addr];
return true;
}
void MinimizeJointMotionResidualFunction::applyResidual(const mjModel& /*model*/, const mjData& data,
double* residual) const
{
// Get the joint address in qpos
int qpos_addr = model->jnt_qposadr[joint_index_];
// Get current joint value from MuJoCo data
const mjtNum current_joint_value = data.qpos[qpos_addr];
// Compute difference from initial joint value (residual 0)
residual[0] = current_joint_value - initial_joint_value_;
}
} // namespace custom_residuals
Step 3: Incorporate the Residual Function into Your MPC Behavior
To use your custom MinimizeJointMotionResidualFunction in your MPC Behavior, you need to update the behavior's header file to include it in the getResiduals() method.
Update the custom_mpc_behavior.hpp file to include your custom residual:
#pragma once
#include "moveit_pro_mpc/residual_functions/joint_acceleration.hpp"
#include "moveit_pro_mpc/residual_functions/joint_velocity.hpp"
#include "moveit_pro_mpc/residual_functions/site_tracking.hpp"
#include "moveit_pro_behavior_interface/mpc_behavior_base.hpp"
// Include your custom residual function header
#include "custom_mpc_behavior/minimize_joint_motion_residual.hpp"
namespace custom_mpc_behavior
{
/**
* @brief Custom MPC Behavior with MinimizeJointMotion residual.
*/
class CustomMpcBehavior : public moveit_pro::behaviors::MPCBehaviorBase<CustomMpcBehavior>
{
public:
CustomMpcBehavior(const std::string& name, const BT::NodeConfiguration& config,
const std::shared_ptr<moveit_pro::behaviors::BehaviorContext>& shared_resources);
static BT::PortsList providedPorts();
/**
* @brief Define the residuals used by this MPC behavior.
* @return A tuple of name-residual pairs.
*/
static auto getResiduals()
{
return std::make_tuple(std::make_pair("site_tracking", moveit_pro_mpc::SiteTrackingResidualFunction()),
std::make_pair("velocity", moveit_pro_mpc::VelocityResidualFunction()),
std::make_pair("acceleration", moveit_pro_mpc::AccelerationResidualFunction()),
// Add your custom residual function
std::make_pair("minimize_joint_motion",
custom_residuals::MinimizeJointMotionResidualFunction()));
}
static BT::KeyValueVector metadata();
};
} // namespace custom_mpc_behavior
Step 4: Update CMakeLists.txt to Build the Residual Function
To ensure your custom residual function is compiled and linked with your MPC Behavior, update the custom_mpc_behavior/CMakeLists.txt file to include the new source file.
Add src/minimize_joint_motion_residual.cpp to the list of source files in the add_library() command:
cmake_minimum_required(VERSION 3.22)
project(custom_mpc_behavior CXX)
find_package(moveit_pro_package REQUIRED)
moveit_pro_package()
set(THIS_PACKAGE_INCLUDE_DEPENDS moveit_pro_behavior_interface pluginlib)
foreach(package IN ITEMS ${THIS_PACKAGE_INCLUDE_DEPENDS})
find_package(${package} REQUIRED)
endforeach()
add_library(
custom_mpc_behavior
SHARED
src/custom_mpc_behavior.cpp
src/minimize_joint_motion_residual.cpp # Add this line
src/register_behaviors.cpp)
target_include_directories(
custom_mpc_behavior
PUBLIC $<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>)
target_link_libraries(custom_mpc_behavior PUBLIC ${THIS_PACKAGE_INCLUDE_DEPENDS})
# Install the plugin description file
pluginlib_export_plugin_description_file(moveit_pro_behavior_interface
custom_mpc_behavior_plugin_description.xml)
# Install headers
install(DIRECTORY include/ DESTINATION include)
# Install the library
install(
TARGETS custom_mpc_behavior
EXPORT custom_mpc_behaviorTargets
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION bin)
After updating the CMakeLists.txt file, rebuild your workspace:
moveit_pro build user_workspace
Once you rebuild your workspace, your MPC Behavior will automatically expose:
- A weight port named
minimize_joint_motionfor tuning the residual weight - A parameter port named
limited_motion_joint_namefor specifying which joint to keep stationary
Step 5: Update the Custom Behavior Ports for the New Residual
Find and update the following new ports in "CustomMpcBehavior" from the new residual:
- Set the
limited_motion_joint_nameparameter tolinear_rail_joint. - Set the
minimize_joint_motionweight to5.
Run the Objective again and notice how the motion of the linear rail joint is restricted. Try increasing the weight on
the minimize_joint_motion residual to something large like 50 and run the Objective again. Notice how the robot can
no longer track the position of the site because the linear rail joint no longer moves but still attempts to track the
orientation of the site using the other joints.