About the User Interface
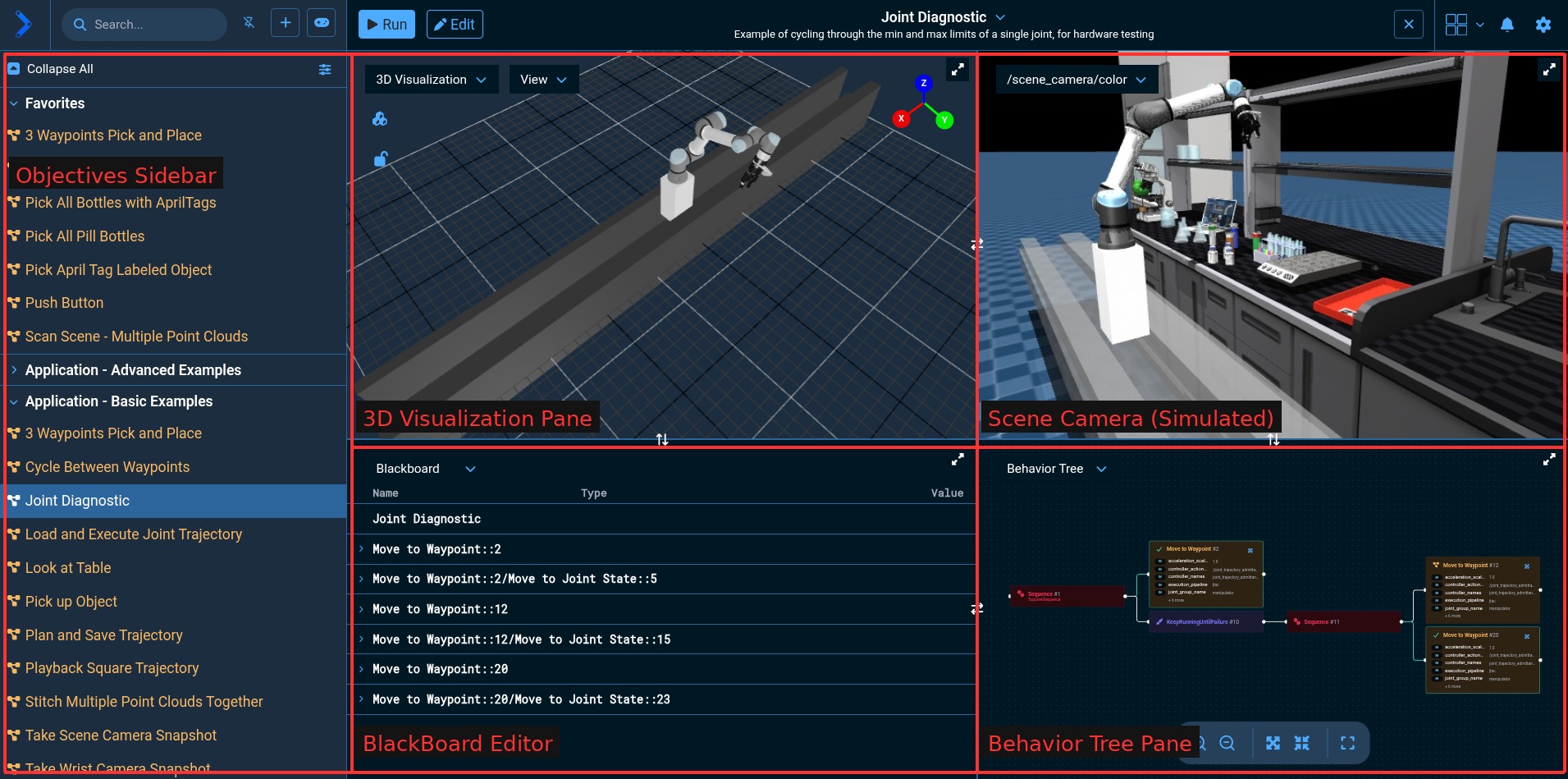
The MoveIt Pro user interface is composed of configurable view panes that provide different perspectives on your robot's state and environment.
Customizing the Panes
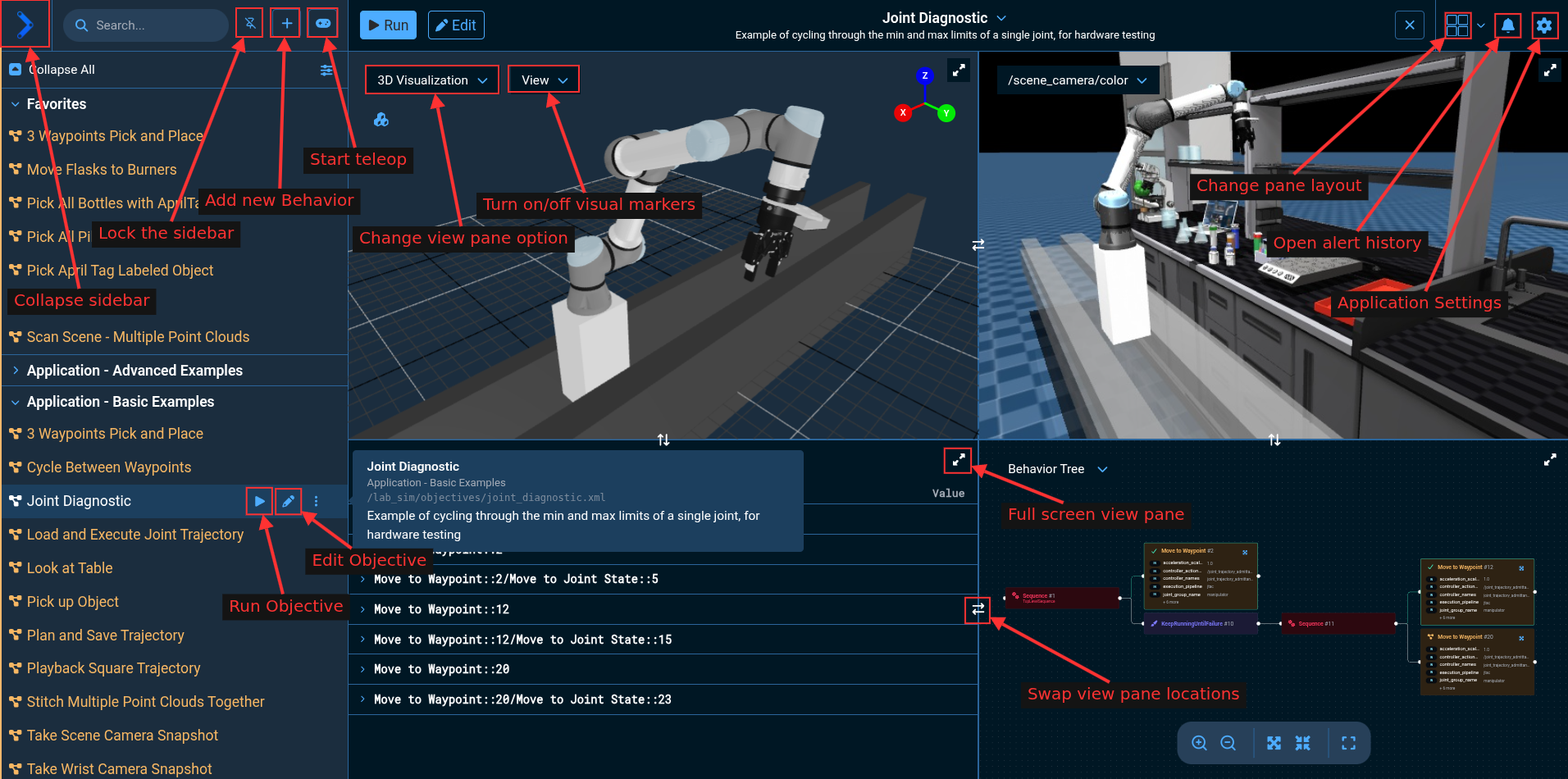
You can change which content is displayed in each pane using the dropdown menu, and adjust the number of panes using the Pane Layout menu in the top right.
Pane Layout
To change the number of visible panes, click the Pane Layout menu in the top right corner. You can choose from several layout options, including 1 through 6 pane configurations.

Changing a View Pane
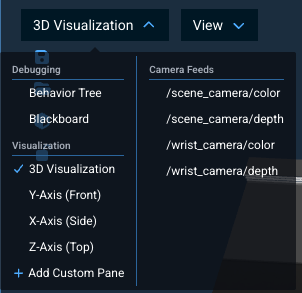
To change the content displayed in any pane, click on the dropdown menu at the top of that pane. A list of available views will appear, including camera feeds, the 3D Visualization, Behavior Tree, Blackboard, Joint Monitor, and more. Select the desired view to switch that pane's content.
3D Visualization Pane
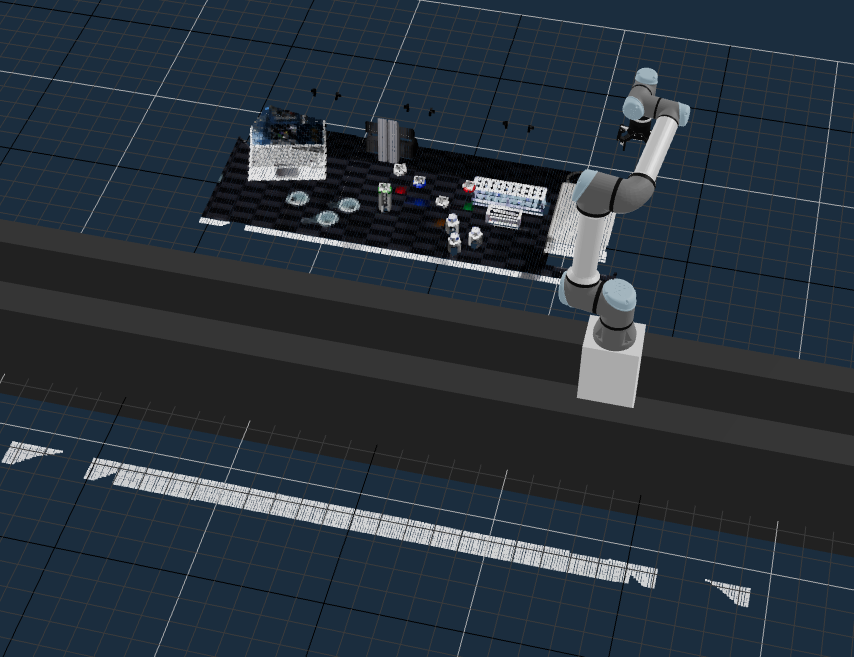
Displays a rendering of what the robot understands of the world, similar to the common Rviz visualizer in ROS. In MoveIt Pro this understanding of the world is stored in a Planning Scene. The Planning Scene is a combination of our robot's URDF model, point clouds, octomaps, meshes, and geometric primitives. These data sources are used to avoid collision with the robot and the world.
The view of the scene can be adjusted by clicking within the pane and dragging the mouse around. The left mouse button rotates the scene, and the right mouse button drags the scene.
Orthographic View Modes
In addition to the default 3D perspective view, MoveIt Pro provides three orthographic views along the X, Y, and Z axes. These allow you to view the robot and scene from multiple perspectives simultaneously, which is useful for precise alignment and debugging.
The different views can be selected from the view dropdown menu in any pane.
Displaying TF Frames
The View menu's Transforms option overlays live TF coordinate frames on the scene as RGB axes, similar to RViz's TF display — handy for checking a frame's pose (such as the robot's tip frame) without opening RViz. See Visualize TF Frames for details.
Camera Feeds
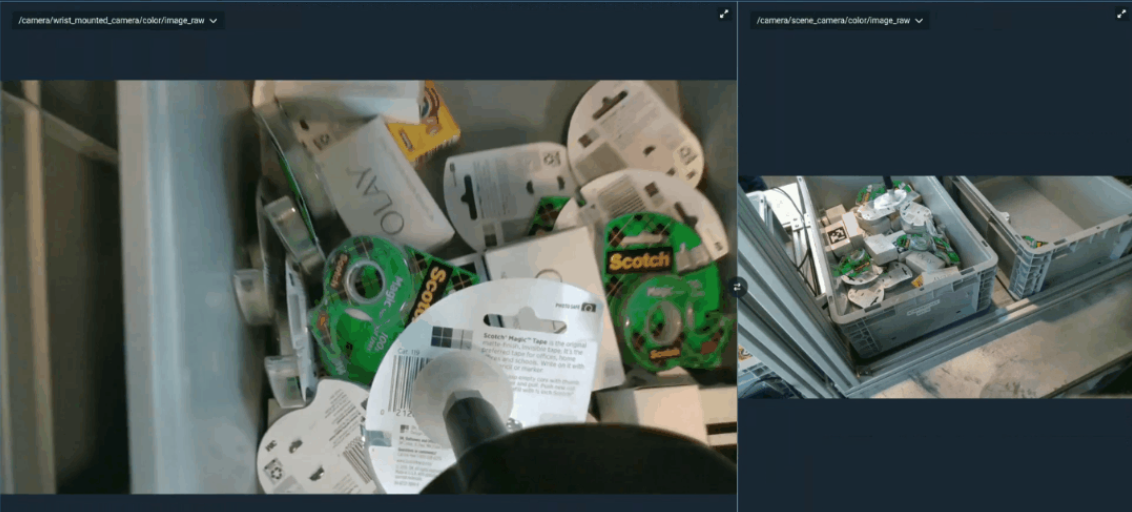
The /scene_camera/color, /scene_camera/depth, /wrist_camera/color, and /wrist_camera/depth panes show the camera feeds from the underlying simulator. If you were connected to hardware, these cameras would show the real world and not simulations.
Behavior Tree Pane
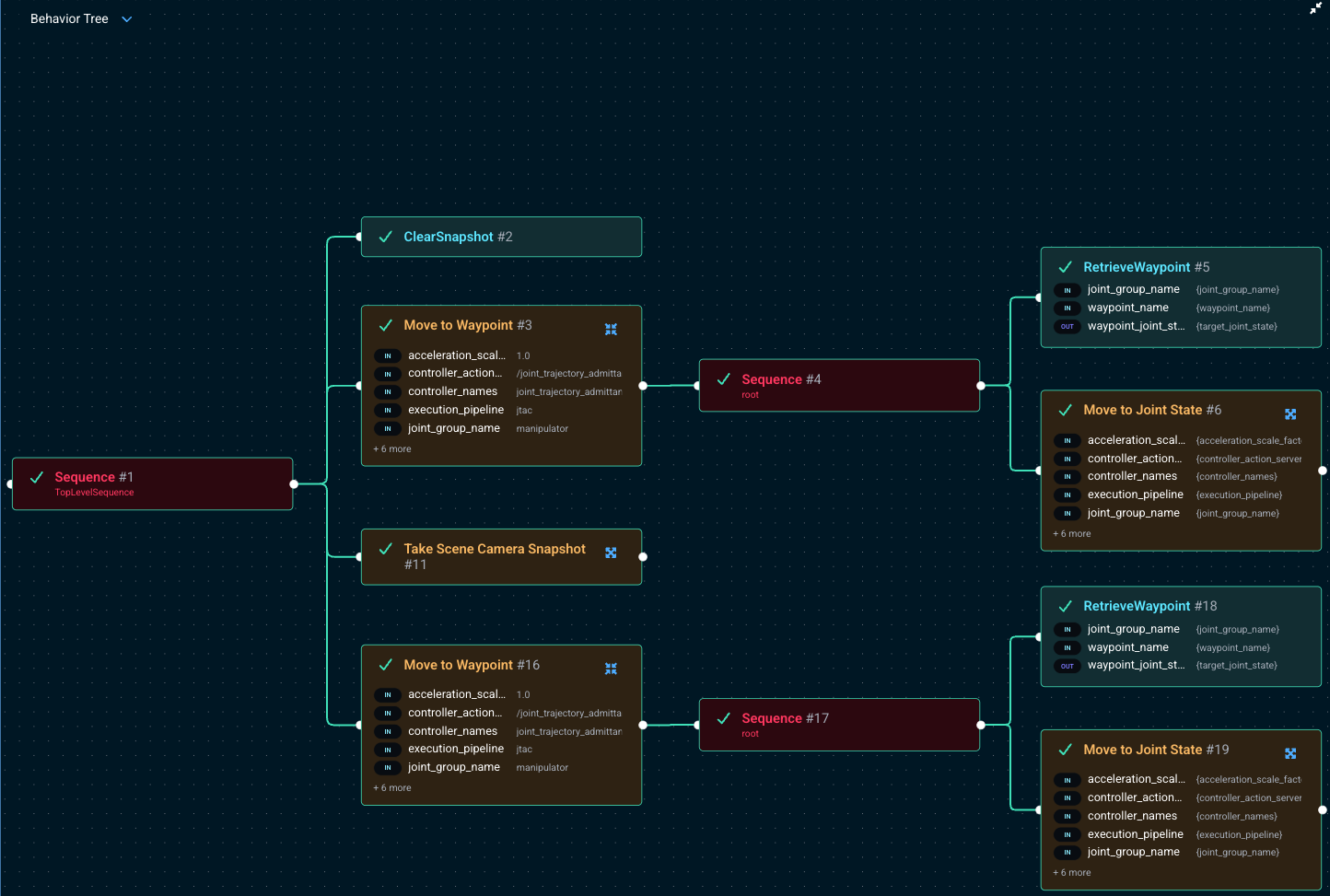
In this pane the most recently run Objective is shown, if any. While running an Objective, this pane will highlight which Behavior is currently executing, which is useful for debugging and introspection.
Blackboard Pane
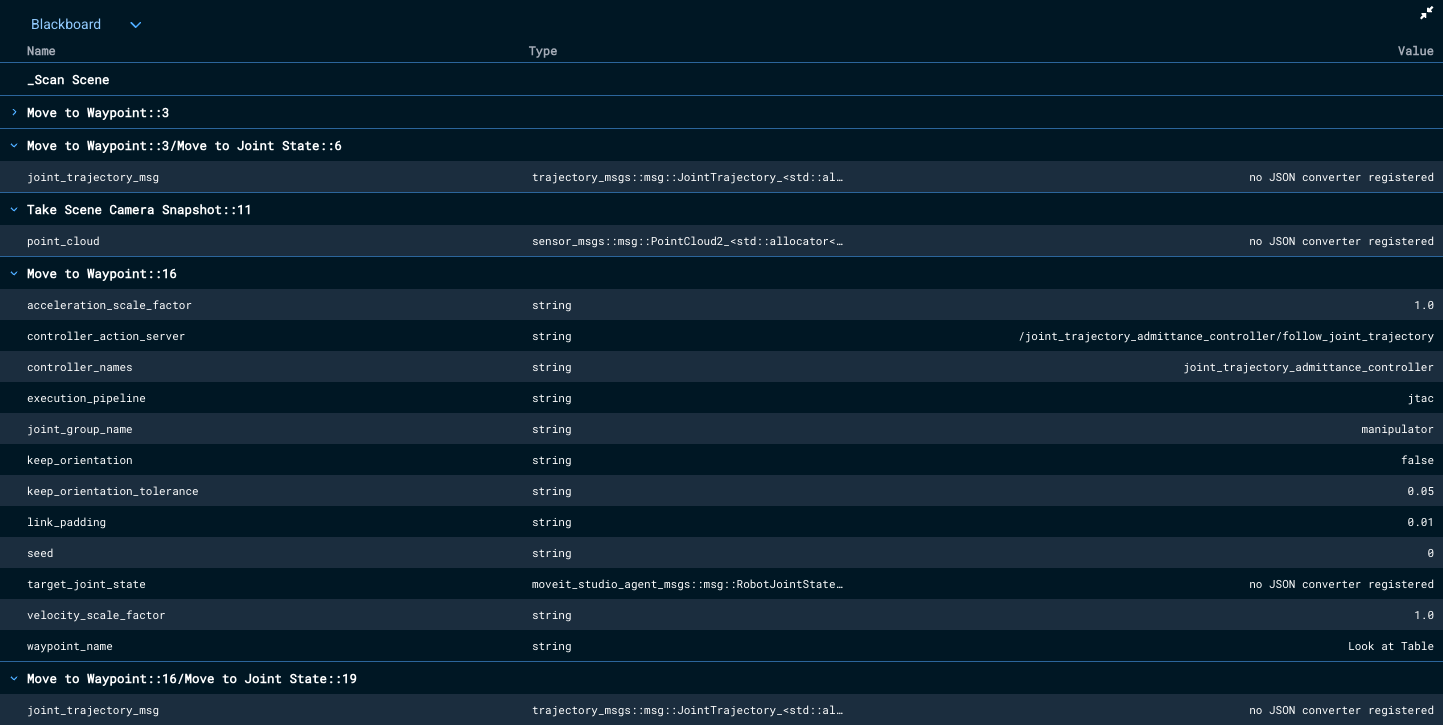
This pane shows the variables being passed around on the Behavior Tree blackboard. These parameters are the key data that is passed around between Behavior nodes.
Terminal Pane
The Terminal pane provides an interactive shell directly in the UI, so you can inspect the running stack — check a ROS topic, tail a log, run ros2 CLI commands, or browse the filesystem — without leaving MoveIt Pro or opening a separate SSH session. It is a full terminal: colors, resizing, and interactive programs such as vim and htop all work.
Open it from any pane's view dropdown under the Terminal (beta) heading, which offers up to two targets:
-
Container — a shell inside the running MoveIt Pro container. Always available, and the right choice for inspecting the ROS 2 environment and workspace.
-
Host — a shell on the host machine. Because commands here run outside the container's sandbox, this target is disabled by default. To enable it, start MoveIt Pro with:
moveit_pro run --allow-host-shellWhen it is not enabled, the Host entry still appears in the dropdown but is disabled, with a tooltip explaining how to enable it.
A status indicator in the toolbar shows the connection state, and Clear resets the screen. Sessions survive a brief network disconnect or a pane switch, so you can keep working without losing shell state.
The Host shell runs with the privileges of the user that launched MoveIt Pro and is outside the container sandbox. Only enable it on machines where that level of access is appropriate.
Joint Monitor Pane

This pane shows, for each active joint, the live value alongside its limits, which is useful for hardware debugging. A dropdown at the top of the pane switches every joint between Position, Velocity, and Acceleration. Each joint shows a horizontal bar with two distinct ticks per bound: the limit declared in the URDF (solid red) and the (often tighter) limit from joint_limits.yaml (dashed). A key at the top explains the marks, and a marker tracks the live value, turning red when it leaves the joint_limits.yaml range. Acceleration is not published on /joint_states, so it is derived by differentiating velocity. A Degrees/Radians toggle controls the units for revolute joints (prismatic joints always read in meters), and a button copies the current joint values to the clipboard. Joints with no position limits (such as continuous wheel joints) are listed last.
Custom View Panes
MoveIt Pro also supports embedding custom iframe-based view panes into the UI. This allows you to integrate external dashboards, tools, or custom web applications directly into the MoveIt Pro interface. See Creating Custom View Panes for details.