|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <scenario_interface.hpp>
Public Attributes | |
| std::string | planning_group_name |
| std::vector< std::string > | goal_joint_names |
| std::vector< double > | goal_joint_positions |
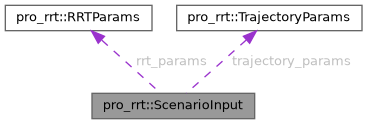
| RRTParams | rrt_params {} |
| TrajectoryParams | trajectory_params {} |
| double | link_padding = 0.0 |
| bool | keep_orientation = false |
| double | keep_orientation_tolerance = 0.05 |
| std::vector< std::string > | keep_orientation_link_names |
| std::vector< JointRangeEntry > | joint_range_constraint |
Captured snapshot of every input that drives a planTrajectoryToJointGoal(...) call. Today captured by the PlanToJointGoal BT behavior, but the struct is behavior-agnostic — any caller that ends up invoking planTrajectoryToJointGoal could fill this in. Constraints are stored in name/scalar form (link names + tolerance, joint-name + lower/upper) because the world_pose_reference for orientation constraints and the joint-index lookup for joint-range constraints are recomputed from the captured planning scene at replay time — they cannot be serialized in isolation.
| std::vector<std::string> pro_rrt::ScenarioInput::goal_joint_names |
| std::vector<double> pro_rrt::ScenarioInput::goal_joint_positions |
| std::vector<JointRangeEntry> pro_rrt::ScenarioInput::joint_range_constraint |
| bool pro_rrt::ScenarioInput::keep_orientation = false |
| std::vector<std::string> pro_rrt::ScenarioInput::keep_orientation_link_names |
| double pro_rrt::ScenarioInput::keep_orientation_tolerance = 0.05 |
| double pro_rrt::ScenarioInput::link_padding = 0.0 |
| std::string pro_rrt::ScenarioInput::planning_group_name |
| RRTParams pro_rrt::ScenarioInput::rrt_params {} |
| TrajectoryParams pro_rrt::ScenarioInput::trajectory_params {} |