Debug Task Constructor Planning Pipelines
MoveIt Task Constructor (MTC) planning pipelines perform a large-scale search for feasible solutions across numerous candidates. Some candidates are expected to fail (e.g., due to unreachable targets), while others may succeed. MTC systematically explores all options to determine a sequence of feasible steps needed to complete the task.
When MTC fails to find a solution —or even when it succeeds— introspecting intermediate solutions and identifying points of failure is often essential.
MTC pipelines are planned with the PlanMTCTask Behavior (see the Pick and Place tutorial using MTC for details).
Once that Behavior is executed, the details of the candidates that MTC evaluated are available for introspection.
MoveIt has an RViz2 plugin for MTC debugging capabilities to visualize the planning pipeline. MoveIt Pro makes it easy to open an RViz2 session with the plugin already configured, just run:
moveit_pro rviz
That will open RViz2, with the MTC Debugger already enabled:
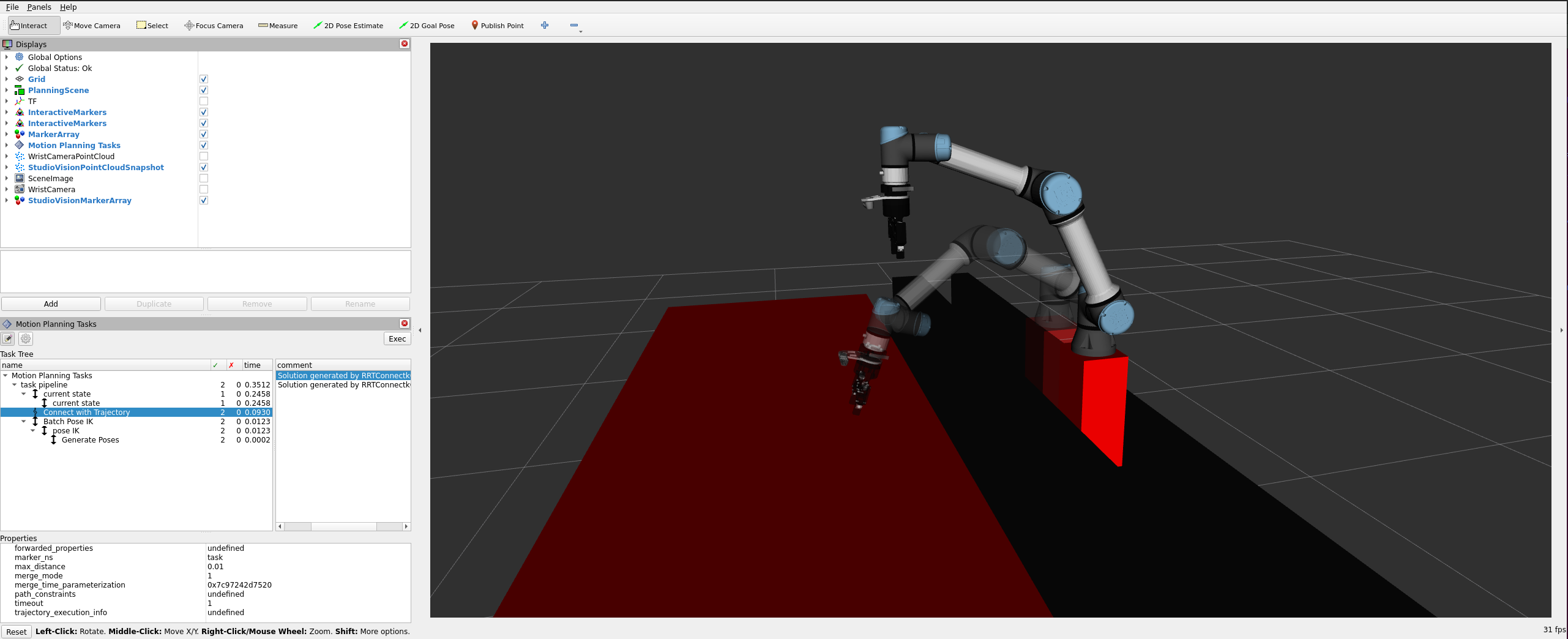
In the bottom left pane, you will see a tree of MTC tasks with details about the inputs and outputs of every stage. By clicking on specific solutions, you can visualize them in the RViz2 visualization window. In addition, the RViz2 MTC plugin will keep a history of all the plans being solved, so you can easily go back in the history to introspect previous plans.