|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <filesystem>#include <future>#include <memory>#include <optional>#include <string>#include <string_view>#include <vector>#include <moveit_pro_behavior_interface/async_behavior_base.hpp>#include <moveit_pro_ml/onnx_sam3_detect.hpp>#include <moveit_pro_ml/onnx_types.hpp>#include <moveit_studio_vision_msgs/msg/mask2_d.hpp>#include <opencv2/core/mat.hpp>#include <sensor_msgs/msg/image.hpp>#include <std_msgs/msg/header.hpp>#include <tl_expected/expected.hpp>#include <vision_msgs/msg/bounding_box2_d.hpp>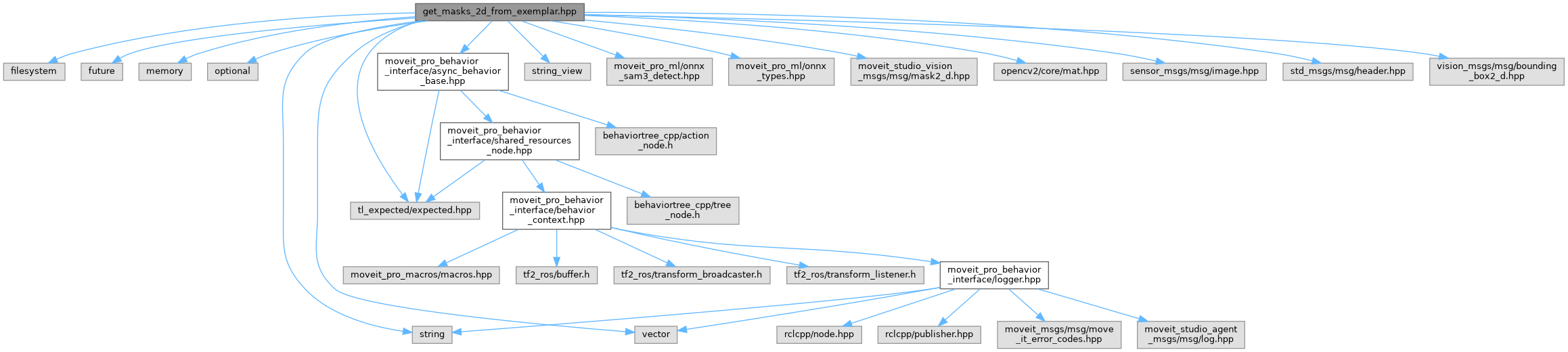
Classes | |
| struct | moveit_pro::behaviors::ExemplarInfo |
| Exemplar-specific metadata captured before resize; present only when an exemplar was provided. More... | |
| struct | moveit_pro::behaviors::CombinedImageResult |
| Result of building the combined inference image (target alone, or target+exemplar side-by-side). More... | |
| struct | moveit_pro::behaviors::PostProcessResult |
| Outputs produced by post-processing SAM3 masks. More... | |
| struct | moveit_pro::behaviors::GetMasks2DFromExemplar |
| Segment an image using SAM3 with multimodal prompts. More... | |
| struct | moveit_pro::behaviors::GetMasks2DFromExemplar::InferenceHandle |
| Interface for SAM3 segmentation inference. More... | |
| struct | moveit_pro::behaviors::GetMasks2DFromExemplar::SAM3DetectHandle |
| Default implementation using SAM3Detect. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |
Typedefs | |
| using | moveit_pro::behaviors::NormalizedBox = moveit_pro_ml::onnx::Box< moveit_pro_ml::onnx::box_format::CXCYWH, moveit_pro_ml::onnx::coord_system::Normalized > |
| Normalized CXCYWH box in SAM3 inference coordinate space. | |
Functions | |
| tl::expected< cv::Mat, std::string > | moveit_pro::behaviors::resizeExemplar (const cv::Mat &exemplar, int target_height) |
| Resize exemplar image maintaining aspect ratio to match target height. | |
| std::vector< NormalizedBox > | moveit_pro::behaviors::combineBboxes (const std::vector< vision_msgs::msg::BoundingBox2D > &target_bboxes, const std::vector< vision_msgs::msg::BoundingBox2D > &exemplar_bboxes, const CombinedImageResult &combined_result) |
| Rescale, offset, and normalize all bounding boxes into a single prompt vector. | |
| tl::expected< PostProcessResult, std::string > | moveit_pro::behaviors::postProcessMasks (const moveit_pro_ml::SAM3Detect::Result &prediction, const CombinedImageResult &combined_image, const std_msgs::msg::Header &image_header) |
| Convert SAM3 output masks to ROS messages and format scores. | |