|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include "cartesian_planning/cartesian_timing.hpp"#include "cartesian_planning/math.hpp"#include "moveit_pro_macros/macros.hpp"#include <fmt/format.h>#include <rclcpp/duration.hpp>#include <cmath>#include <tuple>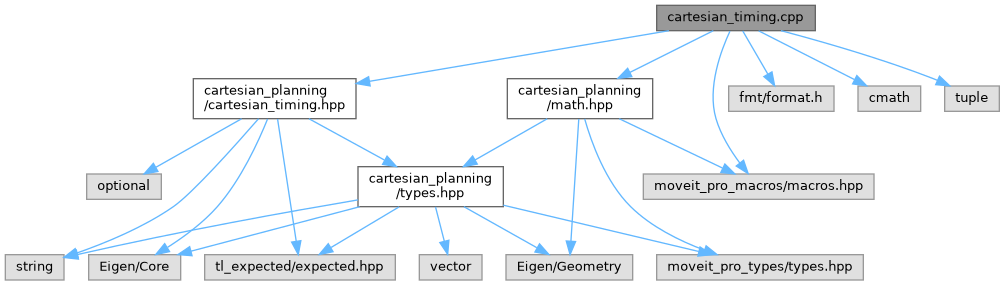
Namespaces | |
| namespace | cartesian_planning |
Functions | |
| tl::expected< ResampledTrajectory, TrapezoidalProfileError > | cartesian_planning::fitCartesianTrapezoidalVelocityProfile (const Path &cartesian_path, const JointSpacePath &joint_path, const CartesianLimits &cartesian_limits, const Eigen::VectorXd &max_joint_velocities, const Eigen::VectorXd &max_joint_accelerations, int control_rate) |
| Assign timestamps to a dense joint-space path so the Cartesian-space trajectory follows a trapezoidal velocity profile. | |
| tl::expected< trajectory_msgs::msg::JointTrajectory, std::string > | cartesian_planning::toJointTrajectoryMessage (const ResampledTrajectory &trajectory, const std::vector< std::string > &joint_names) |
Convert a ResampledTrajectory into a JointTrajectory message. | |
| double accel_distance = 0.0 |
s_accel — arc length consumed during acceleration (seconds).
| double accel_duration = 0.0 |
t_accel — wall-clock duration of the acceleration phase (seconds).
| double cruise_duration = 0.0 |
t_cruise — wall-clock duration of the cruise phase (seconds). 0 for triangle.
| double effective_accel = 0.0 |
a_eff — effective acceleration (1/s).
| bool is_triangle = false |
True if the path is too short to reach cruise speed.
| double peak_speed = 0.0 |
Peak s_dot: 1.0 for trapezoid, < 1.0 for triangle.
| double total_arc_length = 0.0 |
S — total path "time cost" at cruise speed (seconds).
| double total_duration = 0.0 |
T — total trajectory duration (seconds).