|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <optional>#include <string>#include <vector>#include <Eigen/Core>#include <tl_expected/expected.hpp>#include <trajectory_msgs/msg/joint_trajectory.hpp>#include "cartesian_planning/types.hpp"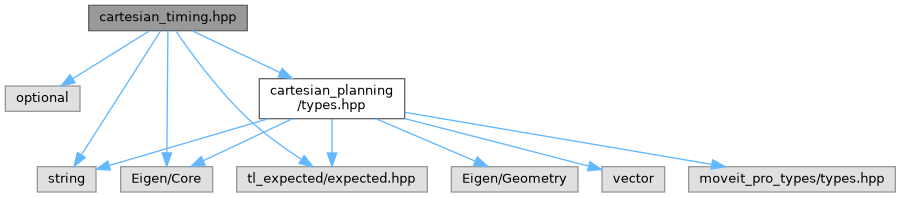
Classes | |
| struct | cartesian_planning::CartesianLimits |
| Cartesian velocity and acceleration limits for the trapezoidal profile. More... | |
| struct | cartesian_planning::TrapezoidalProfileError |
| struct | cartesian_planning::ResampledTrajectory |
| Resampled trajectory data at uniform control rate. More... | |
Namespaces | |
| namespace | cartesian_planning |
Enumerations | |
| enum class | cartesian_planning::SaturationPhase { cartesian_planning::kRamp , cartesian_planning::kCruise } |
Functions | |
| tl::expected< ResampledTrajectory, TrapezoidalProfileError > | cartesian_planning::fitCartesianTrapezoidalVelocityProfile (const Path &cartesian_path, const JointSpacePath &joint_path, const CartesianLimits &cartesian_limits, const Eigen::VectorXd &max_joint_velocities, const Eigen::VectorXd &max_joint_accelerations, int control_rate) |
| Assign timestamps to a dense joint-space path so the Cartesian-space trajectory follows a trapezoidal velocity profile. | |
| tl::expected< trajectory_msgs::msg::JointTrajectory, std::string > | cartesian_planning::toJointTrajectoryMessage (const ResampledTrajectory &trajectory, const std::vector< std::string > &joint_names) |
Convert a ResampledTrajectory into a JointTrajectory message. | |