|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <behaviortree_cpp/action_node.h>#include <Eigen/Dense>#include <geometry_msgs/msg/pose_stamped.hpp>#include <moveit_pro_behavior_interface/get_required_ports.hpp>#include <sensor_msgs/msg/point_cloud2.hpp>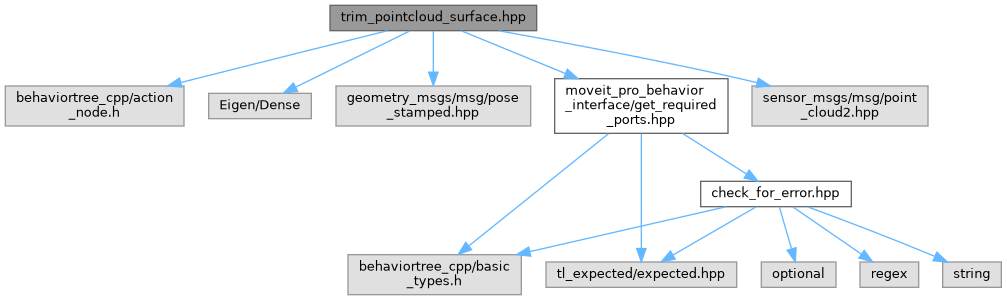
Classes | |
| class | moveit_pro::behaviors::TrimPointcloudSurface |
| Trims a point cloud to contain only points within a quadrilateral boundary defined by 4 waypoints. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |