|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include "moveit_pro_behavior/behaviors/core/compute_signed_distance_field.hpp"#include <array>#include <cstddef>#include <memory>#include <string>#include <vector>#include <fmt/format.h>#include <moveit_msgs/msg/planning_scene.hpp>#include <moveit_pro_base/distance_field/propagation_distance_field.hpp>#include <moveit_pro_base/robot_model/link_model.hpp>#include <moveit_pro_macros/macros.hpp>#include "moveit_pro_behavior_interface/get_required_ports.hpp"#include "moveit_pro_behavior_interface/metadata_fields.hpp"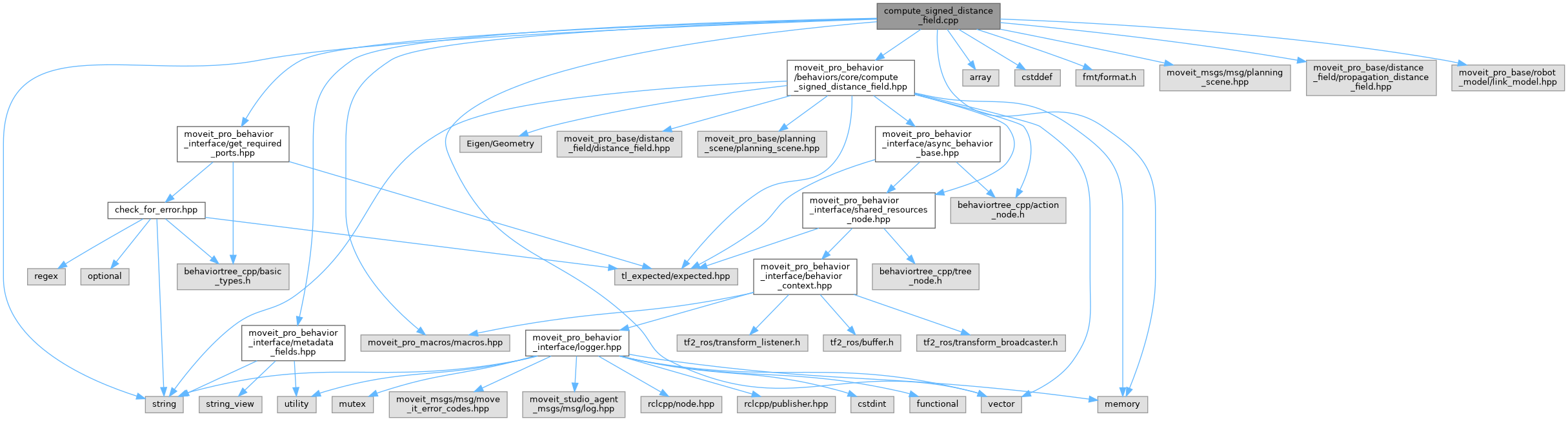
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |
Functions | |
| tl::expected< void, std::string > | moveit_pro::behaviors::validateDistanceFieldParameters (const std::vector< double > &bbox_min, const std::vector< double > &bbox_max, double resolution, double max_distance) |
| Validate the inputs required to build a propagation distance field. | |
| tl::expected< std::shared_ptr< const moveit_pro::base::distance_field::DistanceField >, std::string > | moveit_pro::behaviors::computeSdfFromPlanningScene (const moveit_pro::base::planning_scene::PlanningScene &planning_scene, const DistanceFieldParameters ¶meters) |
| Build a propagation distance field from a planning scene. | |