|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <moveit_pro_behavior/behaviors/core/compute_link_pose_forward_kinematics.hpp>#include <spdlog/spdlog.h>#include <moveit_pro_behavior_interface/get_required_ports.hpp>#include <moveit_pro_base/robot_state/robot_state.hpp>#include <tf2_eigen/tf2_eigen.hpp>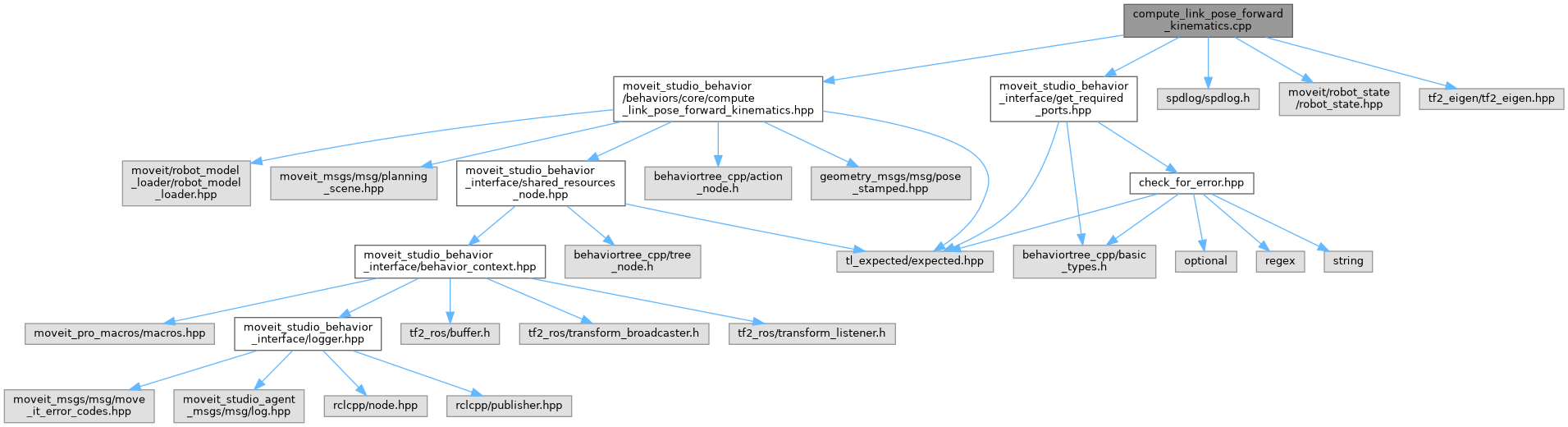
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |