|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <behaviortree_cpp/action_node.h>#include <moveit_pro_behavior_interface/shared_resources_node.hpp>#include <geometry_msgs/msg/pose_stamped.hpp>#include <moveit_msgs/msg/planning_scene.hpp>#include <moveit_pro_base/robot_model_loader/robot_model_loader.hpp>#include <tl_expected/expected.hpp>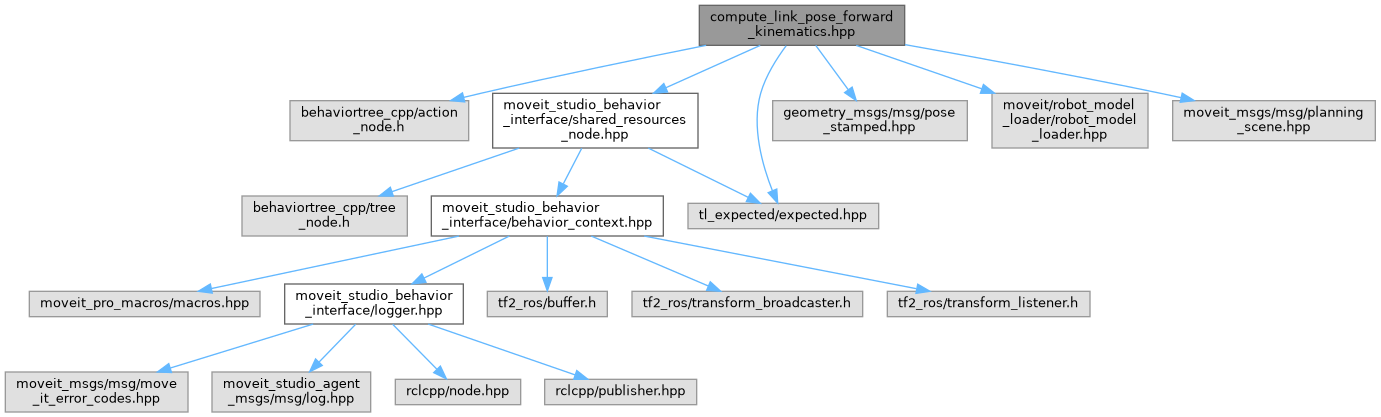
Classes | |
| class | moveit_pro::behaviors::ComputeLinkPoseForwardKinematics |
| This Behavior computes the Cartesian Pose of a link from a given Joint State. If the Joint State message does not contain all of the joints for calculating the pose, it will use the existing joint states for the missing joint states. More... | |
| struct | moveit_pro::behaviors::ComputeLinkPoseForwardKinematics::InfoAndWarnings |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |