|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
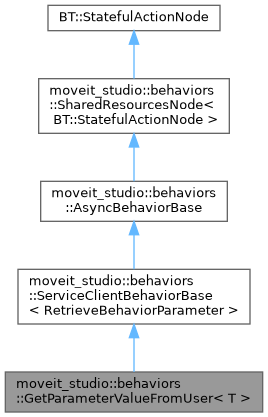
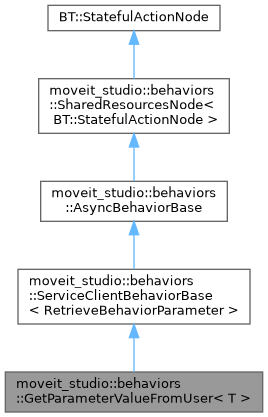
This is a template class to get parameter values which are stored in a map in the Objective Server node. The map contains parameter overrides which are specified when creating the DoObjectiveSequence goal. Given a parameter name, send a service request to the Objective Server to retrieve user input value for the parameter named parameter_name.
More...
#include <get_parameter_from_user.hpp>
Public Member Functions | |
| GetParameterValueFromUser (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| Constructor for GetParameterValueFromUser behavior. | |
 Public Member Functions inherited from moveit_studio::behaviors::ServiceClientBehaviorBase< RetrieveBehaviorParameter > Public Member Functions inherited from moveit_studio::behaviors::ServiceClientBehaviorBase< RetrieveBehaviorParameter > | |
| ServiceClientBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| Constructs ServiceClientBehaviorBase using the RclcppClientInterface. | |
| ServiceClientBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources, std::unique_ptr< ClientInterfaceBase< RetrieveBehaviorParameter > > client_interface) | |
| Constructs ServiceClientBehaviorBase using a user-provided implementation of ClientInterfaceBase. | |
| virtual | ~ServiceClientBehaviorBase ()=default |
| Public Member Functions inherited from moveit_studio::behaviors::AsyncBehaviorBase | |
| AsyncBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| virtual | ~AsyncBehaviorBase ()=default |
| BT::NodeStatus | onStart () override |
| Required implementation of BT::StatefulActionNode::onStart(). | |
| BT::NodeStatus | onRunning () override |
| Required implementation of BT::StatefulActionNode::onRunning(). | |
| void | onHalted () override |
| Required implementation of BT::StatefulActionNode::onHalted(). | |
| void | resetStatus () |
| Resets the internal status of this node. | |
| Public Member Functions inherited from moveit_studio::behaviors::SharedResourcesNode< BT::StatefulActionNode > | |
| SharedResourcesNode (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| Constructor for SharedResourcesNode. Called by BT::BehaviorTreeFactory when creating a new behavior tree containing this node. | |
Additional Inherited Members | |
| Static Public Attributes inherited from moveit_studio::behaviors::ServiceClientBehaviorBase< RetrieveBehaviorParameter > | |
| static constexpr std::chrono::seconds | kTimeoutWaitForServiceServer |
| Protected Member Functions inherited from moveit_studio::behaviors::ServiceClientBehaviorBase< RetrieveBehaviorParameter > | |
| virtual tl::expected< std::chrono::duration< double >, std::string > | getResponseTimeout () |
| Optional user-provided function to set the timeout used when waiting for the service response. | |
| virtual tl::expected< std::chrono::duration< double >, std::string > | getWaitForServerAvailableTimeout () |
| Optional user-provided function to set the timeout used when waiting for the service server to be available. | |
| virtual tl::expected< bool, std::string > | processResponse (const typename ServiceT::Response &) |
| Optional user-provided function to process the service response after the service has finished. | |
| Protected Member Functions inherited from moveit_studio::behaviors::AsyncBehaviorBase | |
| void | notifyCanHalt () |
| Called when runAsync() finishes to notify onHalted() that the async process has finished. | |
| Protected Attributes inherited from moveit_studio::behaviors::SharedResourcesNode< BT::StatefulActionNode > | |
| std::shared_ptr< BehaviorContext > | shared_resources_ |
This is a template class to get parameter values which are stored in a map in the Objective Server node. The map contains parameter overrides which are specified when creating the DoObjectiveSequence goal. Given a parameter name, send a service request to the Objective Server to retrieve user input value for the parameter named parameter_name.
Warning: Behaviors derived from this class are currently for internal MoveIt Pro use only!
| Data Port Name | Port Type | Object Type |
|---|---|---|
| parameter_name | Input | std::string |
| parameter_value | Output | moveit_studio_sdk_msgs::msg::BehaviorParameter |
|
explicit |
Constructor for GetParameterValueFromUser behavior.
| name | Name of the node. Must match the name used for this node in the behavior tree definition file (the .xml file). |
| config | Node configuration. Only used here because BehaviorTree.CPP expects a constructor signature with name and config first before custom constructor parameters. |
| shared_resources | Provides access to common resources such as the node handle and failure logger that are shared between all the behaviors that inherit from moveit_studio::behaviors::SharedResourcesNode. |