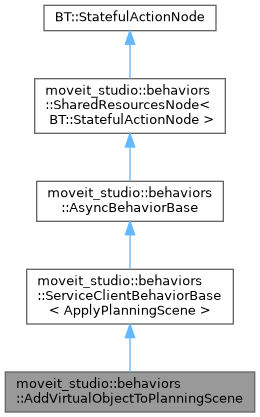
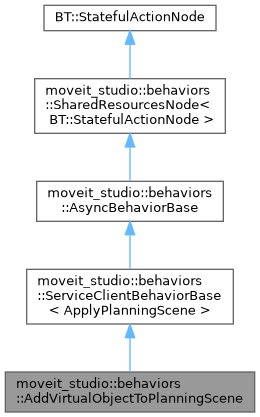
Uses the service provided by the ApplyPlanningScene MoveGroup capability plugin to add a virtual collision object to the planning scene. A virtual collision object can collide with other 'virtual' objects in the planning scene, but not with the robot links, or any other objects that are considered not virtual, e.g. added via AddURDF or ModifyObjectInPlanningScene.
More...
|
| | AddVirtualObjectToPlanningScene (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| | Constructor for the AddVirtualObjectToPlanningScene behavior.
|
| |
| | AddVirtualObjectToPlanningScene (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources, std::unique_ptr< ClientInterfaceBase< ApplyPlanningScene > > client_interface) |
| |
| | ServiceClientBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| | Constructs ServiceClientBehaviorBase using the RclcppClientInterface.
|
| |
| | ServiceClientBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources, std::unique_ptr< ClientInterfaceBase< ApplyPlanningScene > > client_interface) |
| | Constructs ServiceClientBehaviorBase using a user-provided implementation of ClientInterfaceBase.
|
| |
| virtual | ~ServiceClientBehaviorBase ()=default |
| |
| | AsyncBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| |
| virtual | ~AsyncBehaviorBase ()=default |
| |
| BT::NodeStatus | onStart () override |
| | Required implementation of BT::StatefulActionNode::onStart().
|
| |
| BT::NodeStatus | onRunning () override |
| | Required implementation of BT::StatefulActionNode::onRunning().
|
| |
| void | onHalted () override |
| | Required implementation of BT::StatefulActionNode::onHalted().
|
| |
| void | resetStatus () |
| | Resets the internal status of this node.
|
| |
| | SharedResourcesNode (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| | Constructor for SharedResourcesNode. Called by BT::BehaviorTreeFactory when creating a new behavior tree containing this node.
|
| |
|
| static constexpr std::chrono::seconds | kTimeoutWaitForServiceServer |
| |
| virtual tl::expected< std::chrono::duration< double >, std::string > | getWaitForServerAvailableTimeout () |
| | Optional user-provided function to set the timeout used when waiting for the service server to be available.
|
| |
| virtual tl::expected< bool, std::string > | processResponse (const typename ServiceT::Response &) |
| | Optional user-provided function to process the service response after the service has finished.
|
| |
| tl::expected< void, std::string > | doHalt () override |
| | Handles halting logic which is specific to the service client behavior implementation.
|
| |
| void | notifyCanHalt () |
| | Called when runAsync() finishes to notify onHalted() that the async process has finished.
|
| |
| std::shared_ptr< BehaviorContext > | shared_resources_ |
| |
Uses the service provided by the ApplyPlanningScene MoveGroup capability plugin to add a virtual collision object to the planning scene. A virtual collision object can collide with other 'virtual' objects in the planning scene, but not with the robot links, or any other objects that are considered not virtual, e.g. added via AddURDF or ModifyObjectInPlanningScene.
| Data Port Name | Port Type | Object Type |
| object | Input | moveit_studio_vision_msgs::msg::GraspableObject |
| planning_scene_msg | Input | moveit_msgs::msg::PlanningScene |
| apply_planning_scene_service | Input | std::string |
 Public Member Functions inherited from moveit_studio::behaviors::ServiceClientBehaviorBase< ApplyPlanningScene >
Public Member Functions inherited from moveit_studio::behaviors::ServiceClientBehaviorBase< ApplyPlanningScene >