|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
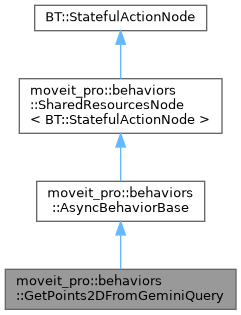
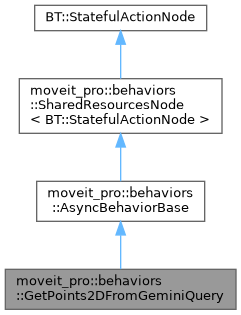
Queries Google Gemini with a text prompt and a ROS image to locate 2D points in the image. More...
#include <get_points2d_from_gemini_query.hpp>
Public Member Functions | |
| GetPoints2DFromGeminiQuery (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources, gemini::GeminiPostFn http_post_fn=nullptr) | |
 Public Member Functions inherited from moveit_pro::behaviors::AsyncBehaviorBase Public Member Functions inherited from moveit_pro::behaviors::AsyncBehaviorBase | |
| AsyncBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| ~AsyncBehaviorBase () override=default | |
| BT::NodeStatus | onStart () override |
| Required implementation of BT::StatefulActionNode::onStart(). | |
| BT::NodeStatus | onRunning () override |
| Required implementation of BT::StatefulActionNode::onRunning(). | |
| void | onHalted () override |
| Required implementation of BT::StatefulActionNode::onHalted(). | |
| void | resetStatus () |
| Resets the internal status of this node. | |
| void | notifyCanHalt () |
| Called when runAsync() finishes to notify onHalted() that the async process has finished. | |
| Public Member Functions inherited from moveit_pro::behaviors::SharedResourcesNode< BT::StatefulActionNode > | |
| SharedResourcesNode (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &behavior_context) | |
| Constructor for SharedResourcesNode. Called by BT::BehaviorTreeFactory when creating a new behavior tree containing this node. | |
| const std::shared_ptr< BehaviorContext > & | getBehaviorContext () const |
Static Public Member Functions | |
| static BT::PortsList | providedPorts () |
| static BT::KeyValueVector | metadata () |
Queries Google Gemini with a text prompt and a ROS image to locate 2D points in the image.
Uses libcurl to POST a multimodal request containing both the text prompt and a JPEG-encoded image to the Gemini generative language API. The API key is read from the GOOGLE_GEMINI_API_KEY environment variable. Because the HTTP call can take several seconds, this behavior is asynchronous and will return RUNNING until the request completes.
The request constrains Gemini via generationConfig.responseMimeType + responseSchema to emit a JSON object with two fields: narrative (a human-readable answer) and points (a list of normalized 2D image coordinates with short labels). The narrative is placed on the response output port, the parsed points on the detected_points output port, and the labels associated with each point on the detected_labels output port (one label per point, same order). Labels are useful when prompts ask Gemini to tag each location with metadata such as an object ID, color, or class name.
| Data Port Name | Port Type | Object Type |
|---|---|---|
| prompt | input | std::string |
| image | input | sensor_msgs::msg::Image |
| model_name | input | std::string (optional) |
| save_debug_image | input | std::string (optional) |
| response | output | std::string |
| detected_points | output | std::vector<geometry_msgs::msg::PointStamped> |
| detected_labels | output | std::vector<std::string> |
| name | The name of the behavior node in the behavior tree. |
| config | The BehaviorTree.CPP node configuration. |
| shared_resources | Shared resources provided to the behavior at runtime. |
| http_post_fn | Optional HTTP-POST function used to talk to Gemini. Defaults to a libcurl implementation when null. Tests inject a fake to avoid real network traffic. |
| moveit_pro::behaviors::GetPoints2DFromGeminiQuery::GetPoints2DFromGeminiQuery | ( | const std::string & | name, |
| const BT::NodeConfiguration & | config, | ||
| const std::shared_ptr< BehaviorContext > & | shared_resources, | ||
| gemini::GeminiPostFn | http_post_fn = nullptr |
||
| ) |
|
static |
|
static |