|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <Eigen/Cholesky>#include <Eigen/Core>#include "cartesian_planning/types.hpp"#include "moveit_pro_macros/macros.hpp"#include "moveit_pro_types/types.hpp"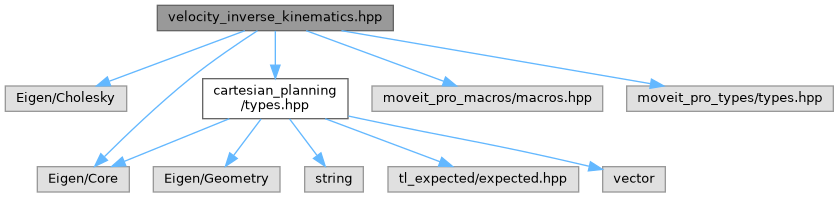
Namespaces | |
| namespace | cartesian_planning |
Functions | |
| template<typename Scalar , int Rows, int Cols, int Options, int MaxRows, int MaxCols> | |
| Eigen::Matrix< Scalar, Cols, 1, Options, MaxCols, 1 > | cartesian_planning::velocityInverseKinematics (const Eigen::MatrixBase< Eigen::Matrix< Scalar, Rows, Cols, Options, MaxRows, MaxCols > > &jacobian, double damping, const Eigen::Matrix< Scalar, Rows, 1, Options, MaxRows, 1 > &cartesian_velocity, const Eigen::MatrixBase< Eigen::Matrix< Scalar, Cols, 1, Options, MaxCols, 1 > > &nullspace_component) |
| Compute joint velocities corresponding to a given Cartesian velocity. | |