|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <moveit_pro_behavior_interface/service_client_behavior_base.hpp>#include <moveit_pro_behavior_interface/shared_resources_node.hpp>#include <rcl_interfaces/srv/set_parameters.hpp>#include <rclcpp/parameter.hpp>#include <string_view>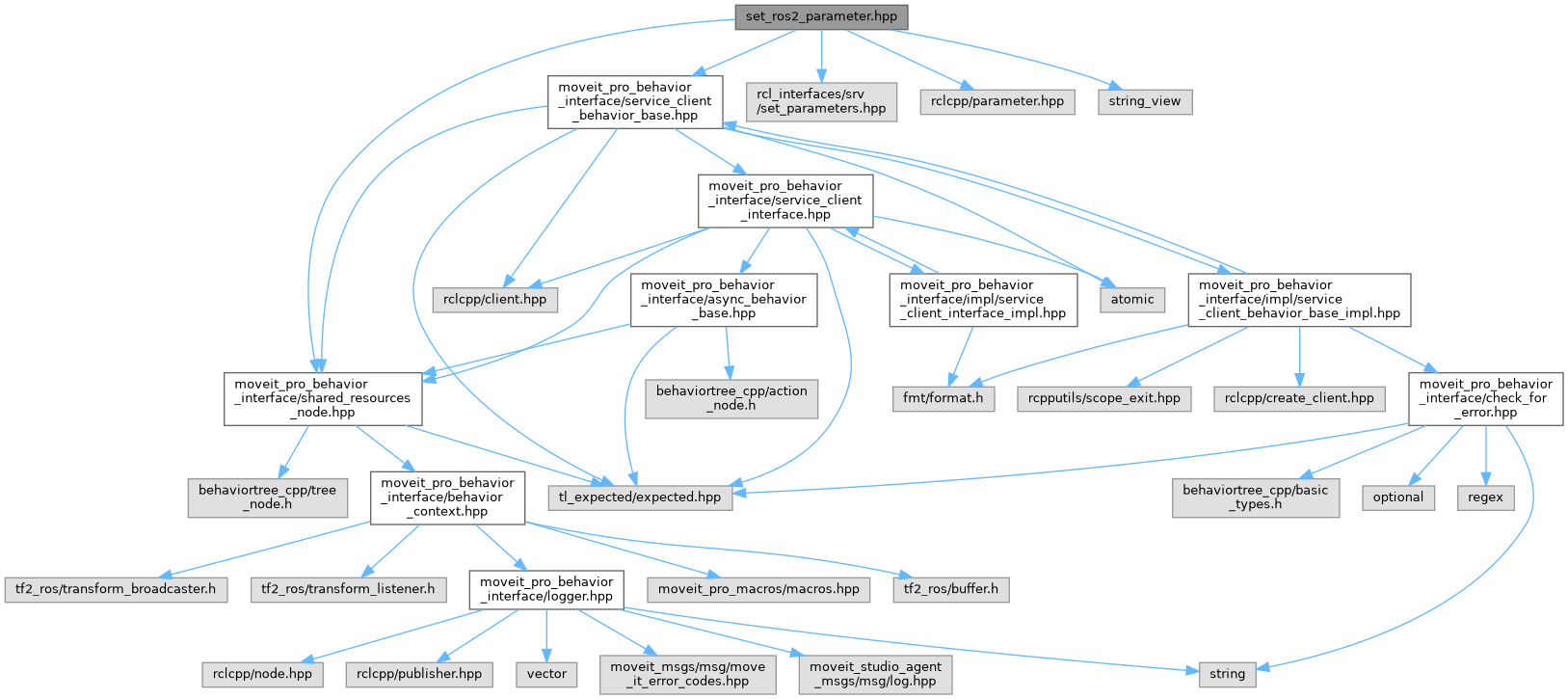
Classes | |
| class | moveit_pro::behaviors::SetRos2Parameter |
| Set any ROS2 parameter on any node at runtime via the standard set_parameters service. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |
Typedefs | |
| using | moveit_pro::behaviors::SetParameters = rcl_interfaces::srv::SetParameters |
Functions | |
| tl::expected< rclcpp::Parameter, std::string > | moveit_pro::behaviors::parseParameterValue (const std::string ¶meter_name, std::string_view value, const std::string &type) |
| Parse a string value into an rclcpp::Parameter of the specified type. | |