|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <moveit_pro_behavior_interface/service_client_behavior_base.hpp>#include <moveit_studio_agent_msgs/msg/robot_joint_state.hpp>#include <moveit_studio_internal_msgs/srv/set_mujoco_joint_states.hpp>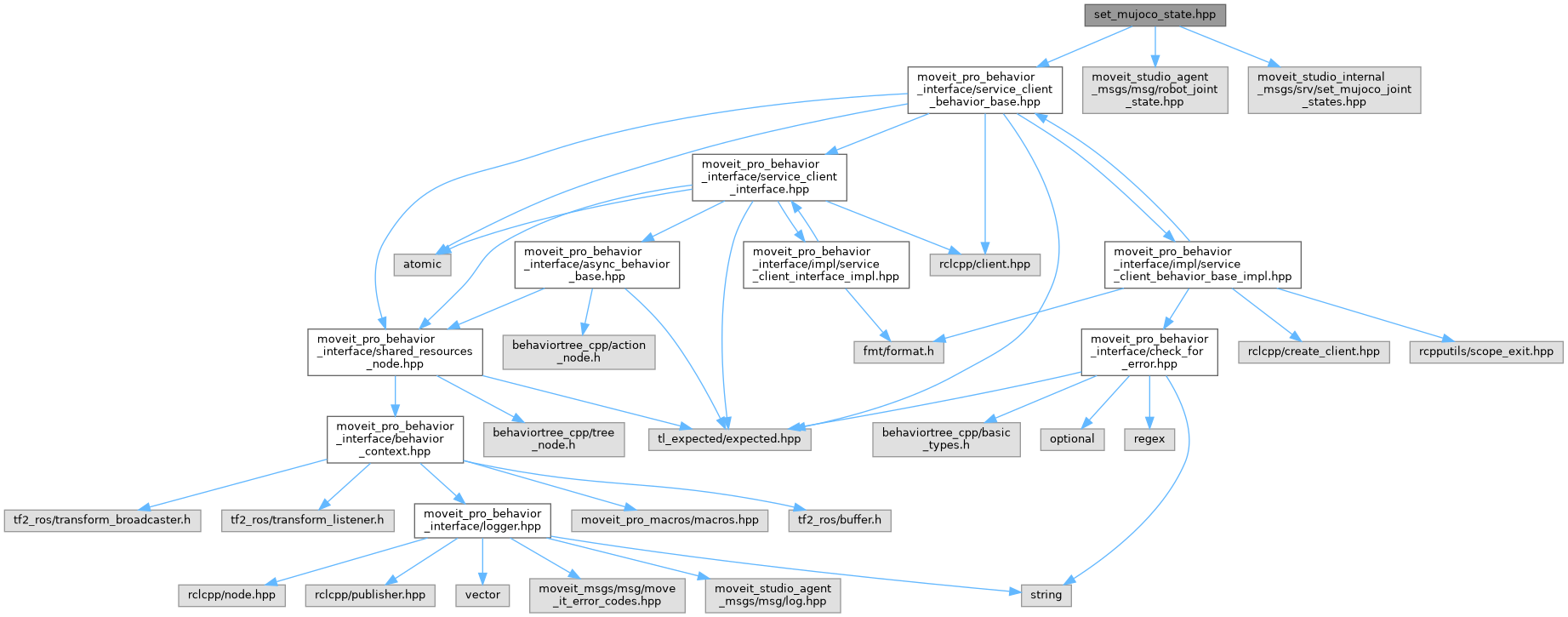
Classes | |
| class | moveit_pro::behaviors::SetMujocoState |
| Sets MuJoCo simulation state to specified joint positions. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |