|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <cstddef>#include <memory>#include <string>#include <string_view>#include <behaviortree_cpp/bt_factory.h>#include <geometry_msgs/msg/pose_stamped.hpp>#include <moveit_msgs/msg/collision_object.hpp>#include <moveit_msgs/msg/planning_scene.hpp>#include <moveit_pro_behavior/utils/planning_scene_bridge.hpp>#include <moveit_pro_behavior_interface/async_behavior_base.hpp>#include <moveit_pro_behavior_interface/shared_resources_node.hpp>#include <tl_expected/expected.hpp>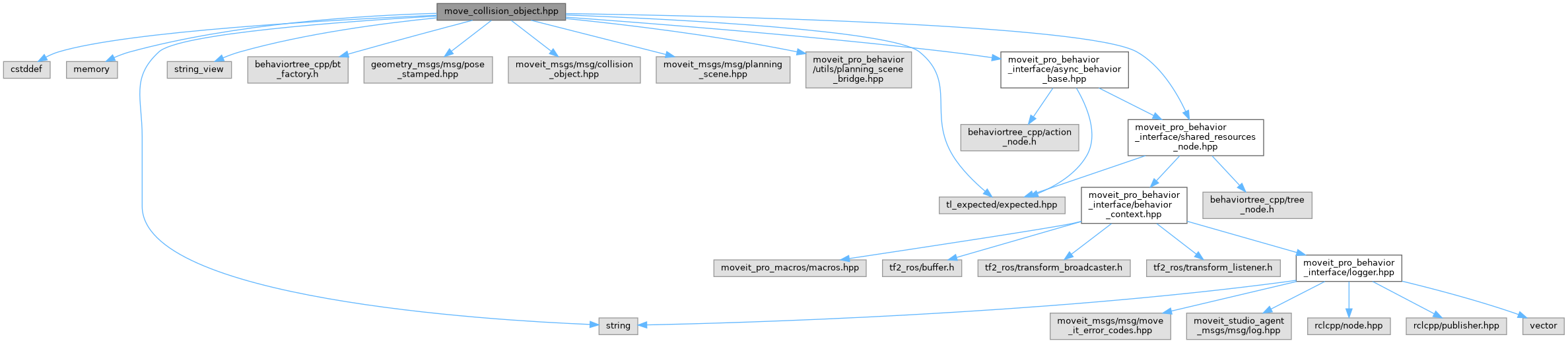
Classes | |
| class | moveit_pro::behaviors::MoveCollisionObject |
| Updates the reference pose of an existing CollisionObject in the planning scene. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |
Functions | |
| moveit_msgs::msg::CollisionObject | moveit_pro::behaviors::buildMoveCollisionObject (std::string_view object_id, const geometry_msgs::msg::PoseStamped &pose) |
| Builds a CollisionObject carrying the MOVE operation for the given id and pose. | |
| tl::expected< std::size_t, std::string > | moveit_pro::behaviors::findExistingWorldObject (std::string_view object_id, const moveit_msgs::msg::PlanningScene &scene) |
| Locates the world entry that a MOVE should target. | |