|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <Eigen/Geometry>#include <tl_expected/expected.hpp>#include <vector>#include "cartesian_planning/types.hpp"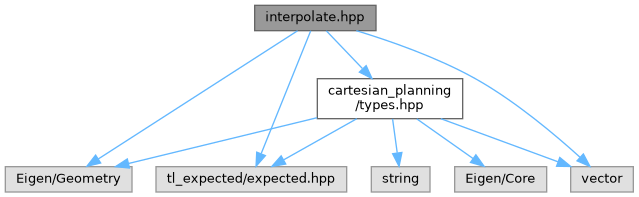
Namespaces | |
| namespace | cartesian_planning |
Functions | |
| tl::expected< Path, ErrorType > | cartesian_planning::interpolate (const Eigen::Isometry3d &start, const Eigen::Isometry3d &end, double max_translational_step, double max_angular_step) |
| Interpolate a Cartesian segment at a given density. | |
| tl::expected< Path, ErrorType > | cartesian_planning::interpolate (const std::vector< Eigen::Isometry3d > &path, double max_translational_step, double max_angular_step, double blending_radius) |
| Interpolate a Cartesian path at a given density. | |
| std::vector< Eigen::Vector3d > | cartesian_planning::interpolateBetweenPoints (const Eigen::Vector3d &point_a, const Eigen::Vector3d &point_b, double spacing) |
| Interpolate linearly between two points in 3D space. | |