|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <behaviortree_cpp/basic_types.h>#include <behaviortree_cpp/tree_node.h>#include <moveit_pro_behavior_interface/async_behavior_base.hpp>#include <moveit_pro_behavior_interface/behavior_context.hpp>#include <string>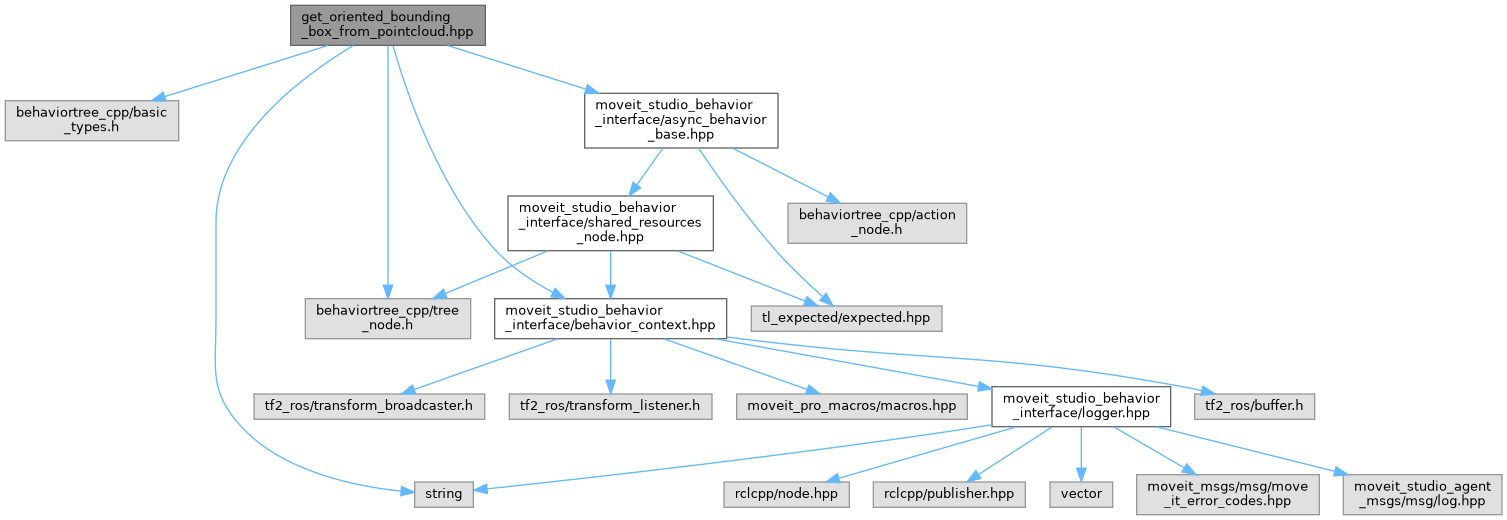
Classes | |
| class | moveit_pro::behaviors::GetOrientedBoundingBoxFromPointCloud |
| Given an input point cloud, finds the oriented bounding box (OBB) using pcl::MomentOfInertiaEstimation and outputs that as a center pose and box dimensions. The OBB orientation is disambiguated by choosing the orientation closest to the reference_pose. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |