|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
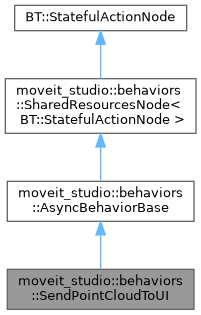
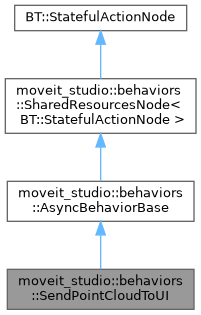
Crop and filter a point cloud using MoveIt's sensor configuration, then publish it to a topic monitored by the UI. More...
#include <send_point_cloud_to_ui.hpp>
Public Member Functions | |
| SendPointCloudToUI (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| Construct a new SendPointCloudToUI Behavior. | |
 Public Member Functions inherited from moveit_studio::behaviors::AsyncBehaviorBase Public Member Functions inherited from moveit_studio::behaviors::AsyncBehaviorBase | |
| AsyncBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| virtual | ~AsyncBehaviorBase ()=default |
| BT::NodeStatus | onStart () override |
| Required implementation of BT::StatefulActionNode::onStart(). | |
| BT::NodeStatus | onRunning () override |
| Required implementation of BT::StatefulActionNode::onRunning(). | |
| void | onHalted () override |
| Required implementation of BT::StatefulActionNode::onHalted(). | |
| void | resetStatus () |
| Resets the internal status of this node. | |
| Public Member Functions inherited from moveit_studio::behaviors::SharedResourcesNode< BT::StatefulActionNode > | |
| SharedResourcesNode (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| Constructor for SharedResourcesNode. Called by BT::BehaviorTreeFactory when creating a new behavior tree containing this node. | |
Static Public Member Functions | |
| static BT::PortsList | providedPorts () |
| Returns list of ports for this behavior. | |
| static BT::KeyValueVector | metadata () |
Additional Inherited Members | |
| Protected Member Functions inherited from moveit_studio::behaviors::AsyncBehaviorBase | |
| virtual tl::expected< void, std::string > | doHalt () |
| Optionally implement additional work needed to cleanly interrupt the async process. | |
| void | notifyCanHalt () |
| Called when runAsync() finishes to notify onHalted() that the async process has finished. | |
| Protected Attributes inherited from moveit_studio::behaviors::SharedResourcesNode< BT::StatefulActionNode > | |
| std::shared_ptr< BehaviorContext > | shared_resources_ |
Crop and filter a point cloud using MoveIt's sensor configuration, then publish it to a topic monitored by the UI.
Will clean up the point cloud, transform it to the "world" frame (which is currently required by the MoveIt Studio web app), and publish the result to the appropriate topic for the provided sensor to update the occupancy map. Will also convert the point cloud to ASCII PCD format to send relevant data through to the UI.
NOTE: No validation is done on the value of the UUID, so any string that is provided (including the empty string) will be set on the output port.
| Data Port Name | Port Type | Object Type |
|---|---|---|
| point_cloud | Input | sensor_msgs::msg::PointCloud2 |
| pcd_topic | Input | std::string |
|
explicit |
Construct a new SendPointCloudToUI Behavior.
| name | See SharedResourcesNode |
| config | See SharedResourcesNode |
| shared_resources | See SharedResourcesNode |
|
static |
|
static |
Returns list of ports for this behavior.
Inputs to this behavior are: the point cloud, sensor_name, an optional point cloud uuid, and the name of the topic to publish the result.