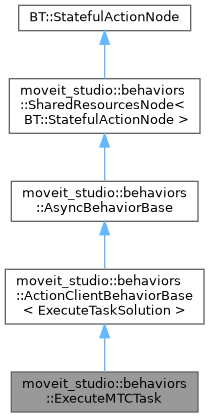
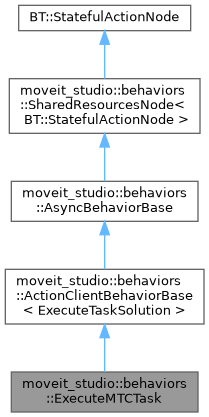
Takes an MTC Solution message via an input data port, and executes the lowest-cost trajectory in that Solution using the MTC ExecuteTaskSolution MoveGroup capability's /execute_task_solution action server.
More...
|
| | ExecuteMTCTask (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| |
| | ActionClientBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| | Constructs ActionClientBehaviorBase using the RclcppClientInterface.
|
| |
| | ActionClientBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources, std::unique_ptr< ClientInterfaceBase > client_interface) |
| | Constructs ActionClientBehaviorBase using a user-provided implementation of ClientInterfaceBase.
|
| |
| virtual | ~ActionClientBehaviorBase ()=default |
| |
| | AsyncBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| |
| virtual | ~AsyncBehaviorBase ()=default |
| |
| BT::NodeStatus | onStart () override |
| | Required implementation of BT::StatefulActionNode::onStart().
|
| |
| BT::NodeStatus | onRunning () override |
| | Required implementation of BT::StatefulActionNode::onRunning().
|
| |
| void | onHalted () override |
| | Required implementation of BT::StatefulActionNode::onHalted().
|
| |
| void | resetStatus () |
| | Resets the internal status of this node.
|
| |
| | SharedResourcesNode (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| | Constructor for SharedResourcesNode. Called by BT::BehaviorTreeFactory when creating a new behavior tree containing this node.
|
| |
|
| using | ClientGoalHandle = rclcpp_action::ClientGoalHandle< ExecuteTaskSolution > |
| |
| virtual tl::expected< bool, std::string > | processResult (const std::shared_ptr< typename ActionT::Result >) |
| | Optional user-provided function to process the action result after the action has finished.
|
| |
| virtual void | processFeedback (const std::shared_ptr< const typename ActionT::Feedback >) |
| | Optional user-provided function to process feedback sent by the action server.
|
| |
| virtual std::string | getTimeoutMessage () const |
| | Optional user-provided function to retrieve and surface an error message when a timeout occurs before the goal result is returned.
|
| |
| virtual std::string | getAbortedMessage (const std::shared_ptr< const typename ActionT::Result >) const |
| | Optional user-provided function to retrieve and surface an error message from an aborted action server result.
|
| |
| void | notifyCanHalt () |
| | Called when runAsync() finishes to notify onHalted() that the async process has finished.
|
| |
| std::shared_ptr< BehaviorContext > | shared_resources_ |
| |
Takes an MTC Solution message via an input data port, and executes the lowest-cost trajectory in that Solution using the MTC ExecuteTaskSolution MoveGroup capability's /execute_task_solution action server.
| Data Port Name | Port Type | Object Type |
| solution | Input | moveit_task_constructor_msgs::msg::Solution |
 Public Member Functions inherited from moveit_studio::behaviors::ActionClientBehaviorBase< ExecuteTaskSolution >
Public Member Functions inherited from moveit_studio::behaviors::ActionClientBehaviorBase< ExecuteTaskSolution >