|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
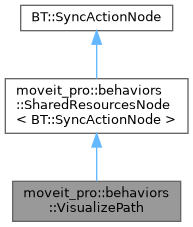
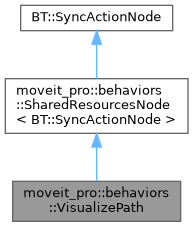
Publishes a marker array that contains a polyline representing a path. More...
#include <visualize_path.hpp>
Public Member Functions | |
| VisualizePath (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| BT::NodeStatus | tick () override |
 Public Member Functions inherited from moveit_pro::behaviors::SharedResourcesNode< BT::SyncActionNode > Public Member Functions inherited from moveit_pro::behaviors::SharedResourcesNode< BT::SyncActionNode > | |
| SharedResourcesNode (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &behavior_context) | |
| Constructor for SharedResourcesNode. Called by BT::BehaviorTreeFactory when creating a new behavior tree containing this node. | |
| const std::shared_ptr< BehaviorContext > & | getBehaviorContext () const |
Static Public Member Functions | |
| static BT::PortsList | providedPorts () |
| static BT::KeyValueVector | metadata () |
Static Public Attributes | |
| static constexpr auto | kPortIDPath = "path" |
| static constexpr auto | kPortIDMarkerLifetime = "marker_lifetime" |
| static constexpr auto | kPortIDMarkerName = "marker_name" |
| static constexpr auto | kPortIDShowPoses = "show_poses" |
| static constexpr auto | kPortIDPoseMarkerSize = "pose_marker_size" |
| static constexpr auto | kPortIDLineColorRgb = "line_color_rgb" |
| static constexpr auto | kPortIDLineWidth = "line_width" |
Publishes a marker array that contains a polyline representing a path.
This Behavior composes a visualization_msgs::msg::MarkerArray message which contains the path to visualize. It publishes the message to a ROS topic named /visual_markers, which is then visualized in the UI.
Input poses can be given in any known frame. The Behavior will transform them to the world frame before visualization. If the transform cannot be found, the Behavior will return a FAILURE status. 'marker_lifetime' is the time in seconds that the path will be visualized. A value of 0 will visualize the path indefinitely.
| Data Port Name | Port Type | Object Type |
|---|---|---|
| path | input | std::vector<geometry_msgs::msg::PoseStamped> |
| marker_lifetime | input | double |
| marker_name | input | std::string |
| show_poses | input | bool |
| pose_marker_size | input | double |
| line_color_rgb | input | std::vector<int> |
| line_width | input | double |
| moveit_pro::behaviors::VisualizePath::VisualizePath | ( | const std::string & | name, |
| const BT::NodeConfiguration & | config, | ||
| const std::shared_ptr< BehaviorContext > & | shared_resources | ||
| ) |
|
static |
|
static |
|
override |
|
staticconstexpr |
|
staticconstexpr |
|
staticconstexpr |
|
staticconstexpr |
|
staticconstexpr |
|
staticconstexpr |