|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
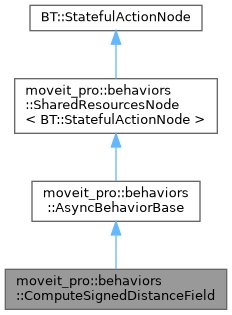
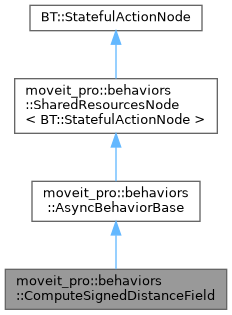
A Behavior to compute a propagation (signed) distance field from a planning scene. More...
#include <compute_signed_distance_field.hpp>
Public Member Functions | |
| ComputeSignedDistanceField (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
 Public Member Functions inherited from moveit_pro::behaviors::AsyncBehaviorBase Public Member Functions inherited from moveit_pro::behaviors::AsyncBehaviorBase | |
| AsyncBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| ~AsyncBehaviorBase () override=default | |
| BT::NodeStatus | onStart () override |
| Required implementation of BT::StatefulActionNode::onStart(). | |
| BT::NodeStatus | onRunning () override |
| Required implementation of BT::StatefulActionNode::onRunning(). | |
| void | onHalted () override |
| Required implementation of BT::StatefulActionNode::onHalted(). | |
| void | resetStatus () |
| Resets the internal status of this node. | |
| virtual tl::expected< void, std::string > | doHalt () |
| Optionally implement additional work needed to cleanly interrupt the async process. | |
| void | notifyCanHalt () |
| Called when runAsync() finishes to notify onHalted() that the async process has finished. | |
| Public Member Functions inherited from moveit_pro::behaviors::SharedResourcesNode< BT::StatefulActionNode > | |
| SharedResourcesNode (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &behavior_context) | |
| Constructor for SharedResourcesNode. Called by BT::BehaviorTreeFactory when creating a new behavior tree containing this node. | |
| const std::shared_ptr< BehaviorContext > & | getBehaviorContext () const |
Static Public Member Functions | |
| static BT::PortsList | providedPorts () |
| static BT::KeyValueVector | metadata () |
A Behavior to compute a propagation (signed) distance field from a planning scene.
This async Behavior is intended to run once after the planning scene is finalized so that downstream collision-aware planners can reuse the resulting field without rebuilding it. Each world collision object in the planning scene is voxelized into a propagation distance field over an axis-aligned bounding box defined in the planning frame. When signed_distance is enabled, distances are also propagated negatively inside obstacles.
| Data Port Name | Port Type | Object Type |
|---|---|---|
| planning_scene | input | moveit_msgs::msg::PlanningScene |
| bbox_min | input | std::vector<double> |
| bbox_max | input | std::vector<double> |
| resolution | input | double |
| max_distance | input | double |
| signed_distance | input | bool |
| link_names | input | std::vector<std::string> |
| sdf | output | std::shared_ptr<const moveit_pro::base::distance_field::DistanceField> |
| moveit_pro::behaviors::ComputeSignedDistanceField::ComputeSignedDistanceField | ( | const std::string & | name, |
| const BT::NodeConfiguration & | config, | ||
| const std::shared_ptr< BehaviorContext > & | shared_resources | ||
| ) |
|
static |
|
static |