|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include "moveit_pro_behavior_interface/service_client_behavior_base.hpp"#include "moveit_pro_behavior_interface/shared_resources_node.hpp"#include "moveit_studio_agent_msgs/srv/add_urdf.hpp"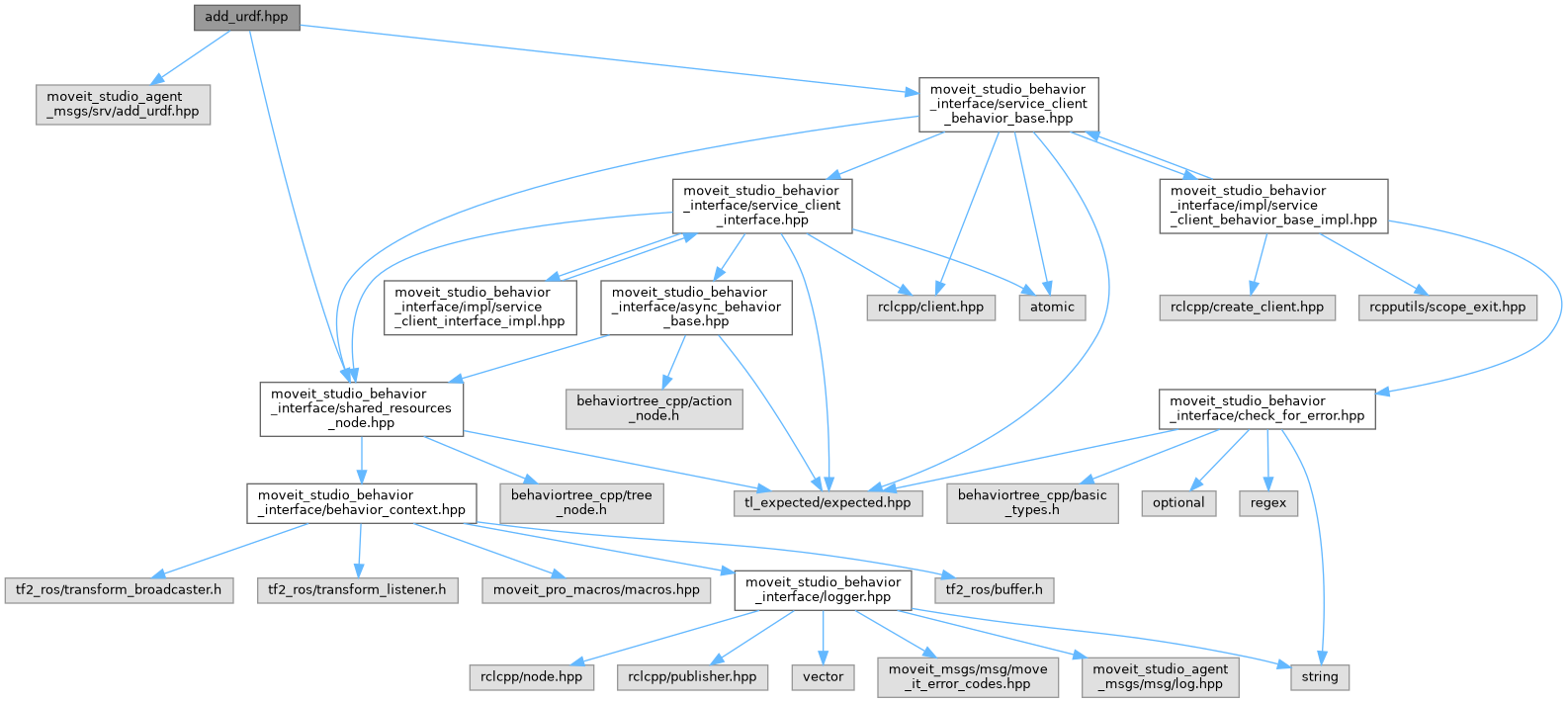
Classes | |
| class | moveit_pro::behaviors::AddURDF |
| This Behavior sends a request to add a URDF object to the planning scene as a collision object. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |