Teleoperation Overview & Setup Guide
MoveIt Pro provides comprehensive teleoperation capabilities to manually control your robot when needed. Whether you need to fine-tune positioning, escape from stuck situations, or collect waypoints for future use, MoveIt Pro offers multiple teleoperation methods to suit different use cases.
UI-Based Teleoperation
UI-based teleoperation methods are controlled directly through the MoveIt Pro web interface using on-screen controls. These methods are ideal for precise movements and don't require additional hardware.
Teleoperation modes can be accessed from the Teleoperate button in the top left corner of the web app, or by running the Request Teleoperation Objective.

Joint Jog
Joint Jog mode allows you to control individual robot joints using spinners in the UI. This method provides:
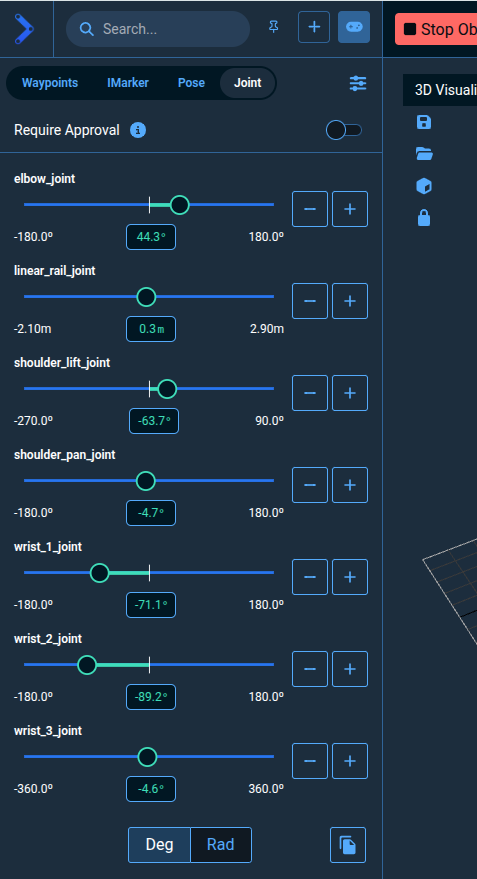
- Direct joint control: Move each joint independently with precise control
- Joint limits awareness: Automatically respects joint position, velocity, and acceleration limits
- Collision checking: Optional collision detection to prevent unsafe movements
- Collision alerts: If the robot is in self-collision or environment collision, joint buttons will fail and joint sliders will name the colliding entities
- Speed control: Adjustable servo speed for different precision requirements
Joint Jog is ideal when you need to move the robot to specific joint configurations or when Cartesian movements are not suitable due to singularities or workspace limits.
Pose Jog
Pose Jog mode enables Cartesian control of the robot's end-effector using directional buttons in the UI. This method offers:
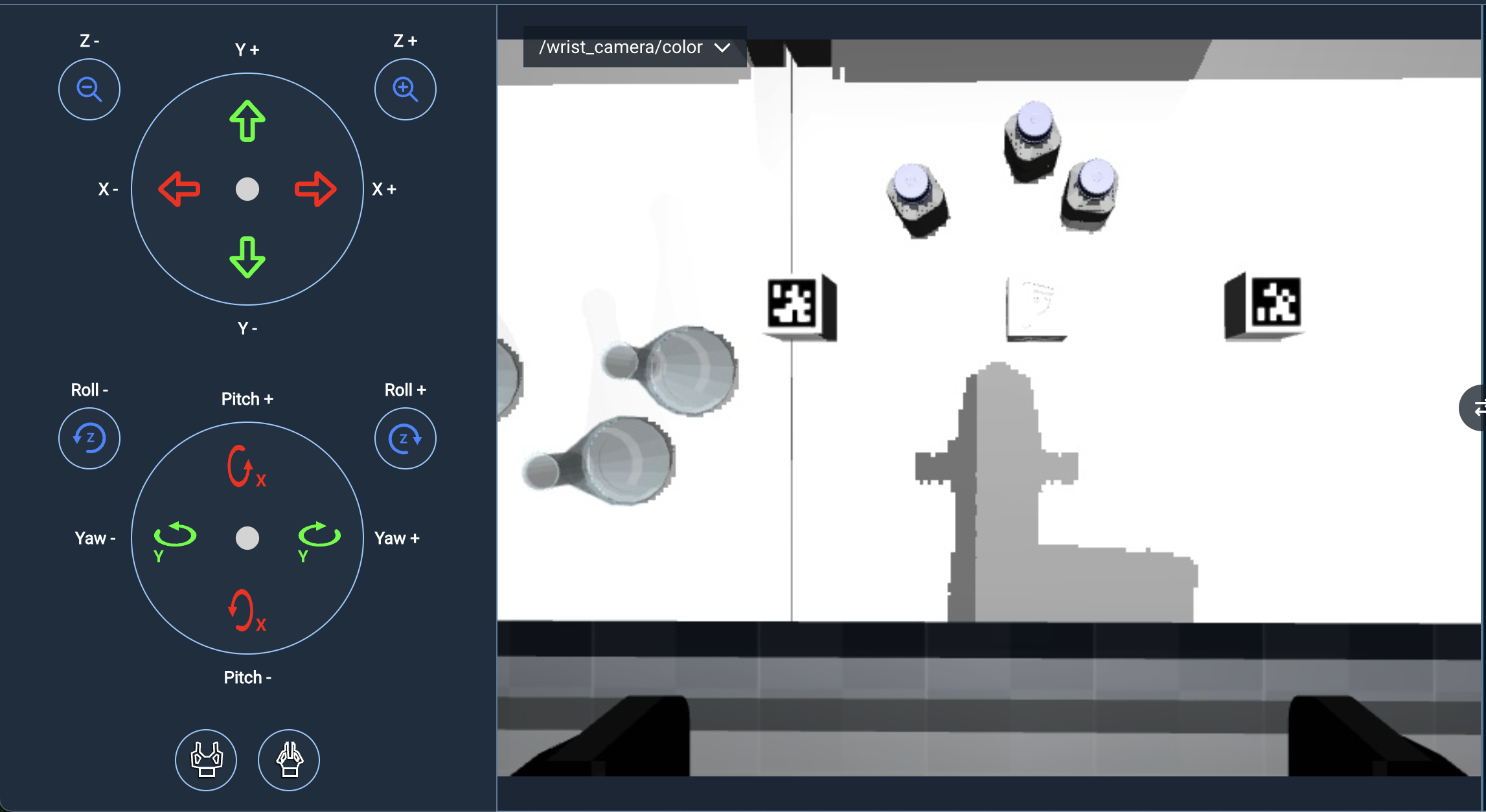
- Cartesian control: Translate and rotate the end-effector in Cartesian space
- Multi-group support: Switch between different planning groups and controllers
- Singularity handling: Stable control even at singularities and workspace limits
- Collision avoidance: Advanced collision detection with automatic escape capabilities
- Collision alerts: If the robot is in self-collision or environment collision, pose jogging will name and visualize colliding entities
- Configurable limits: Adjustable Cartesian speed and acceleration limits
Pose Jog is perfect for precise end-effector positioning and intuitive Cartesian movements. See the Pose Jog configuration guide for setup details.
Interactive Markers
Interactive Markers provide a visual way to control the robot by dragging 3D markers in the visualization pane. Features include:
- Visual control: Click and drag arrows and discs to move the end-effector
- Real-time preview: See inverse kinematics solutions before committing to movements
- Trajectory planning: Automatic path planning from current pose to target pose
- Visual feedback: Clear indication when no valid IK solution exists
- Collision alerts: If the robot is in self-collision or environment collision, IMarker planning will fail
Interactive Markers are excellent for intuitive spatial positioning and when you need to visualize the target pose before moving.
Waypoint Control
Waypoint Control allows you to move the robot to previously saved joint configurations. This mode provides:
- Saved positions: Quick access to frequently used robot poses
- Planning group flexibility: Save waypoints for individual or combined planning groups
- Favorites system: Mark commonly used waypoints for quick access
- Easy management: Add, remove, and organize waypoints through the UI
- Collision alerts: If the robot is in self-collision or environment collision, waypoint planning will name and visualize colliding entities
Waypoint Control is ideal for returning to known good positions or implementing repetitive positioning tasks.
Hardware-Based Teleoperation
Hardware-based teleoperation uses external input devices to provide hands-on control of the robot. These methods offer tactile feedback and can be more intuitive for certain applications.
Game Controllers

MoveIt Pro supports standard USB game controllers, including Xbox controllers, and provides intuitive mapping for robot control.
Supported Controllers
- Xbox 360 Controller: Full support over USB or wireless connections
- Xbox One Controller: Compatible over wired connections with no additional setup
- Generic USB gamepads: Most standard USB game controllers work out of the box
Setup Requirements
- Simply plug in your USB controller when MoveIt Pro UI is launched
- MoveIt Pro uses your browser's built-in game controller support
- For Xbox One wireless dongles, xow is required
Control Mapping
Game controllers typically provide:
- Left stick: Translational movement (X/Y axes)
- Right stick: Rotational movement (X/Y axes)
- Triggers: Z-axis translation (up/down)
- Bumpers: Z-axis rotation
MoveIt Pro does not work with game controllers in headless mode.
Haply Haptic Controller
MoveIt Pro supports 6DoF input devices, including Haply Robotics haptic controllers. These devices provide:
- Force feedback: Feel resistance when the robot encounters obstacles (Future work)
- High precision: Fine-grained control suitable for delicate operations
- 6DoF input: Full 6-degree-of-freedom position and orientation control
- Plug-and-play: Works out of the box when connected via USB
Haply controllers are ideal for applications requiring precise manipulation with tactile feedback, such as assembly tasks or delicate part handling.
For detailed setup instructions, see the Haply Haptic Controller Setup Guide.
Meta Quest VR Controller

MoveIt Pro supports teleoperation using Meta Quest VR headsets for immersive robot control. The VR interface provides:
- Immersive control: Natural hand movements translate to robot motion
- Clutching mechanism: Grab and release target positions intuitively
- Real-time feedback: Live visualization of robot state and target poses
The Meta Quest setup requires a Unity app running on the headset and network communication with MoveIt Pro. See the Meta Quest setup guide for detailed installation and configuration instructions.
Choosing the Right Teleoperation Method
| Method | Best For | Precision | Setup Required* |
|---|---|---|---|
| Joint Jog | Joint-specific movements, singularity avoidance | High | None |
| Pose Jog | Cartesian movements, end-effector positioning | High | None |
| Interactive Markers | Visual positioning, trajectory preview | Medium | None |
| Game Controllers | Familiar interface to many users | Medium | Plug in USB |
| Haply Haptic | Force-sensitive tasks, delicate manipulation | Very High | Setup Guide |
| Meta Quest VR | Intuitive hardware-based teleop | Medium | Extensive setup |
To see all our supported hardware, including controllers and haptic devices, please visit our hardware ecosystem page.