action_client_behavior_base.hpp File Reference
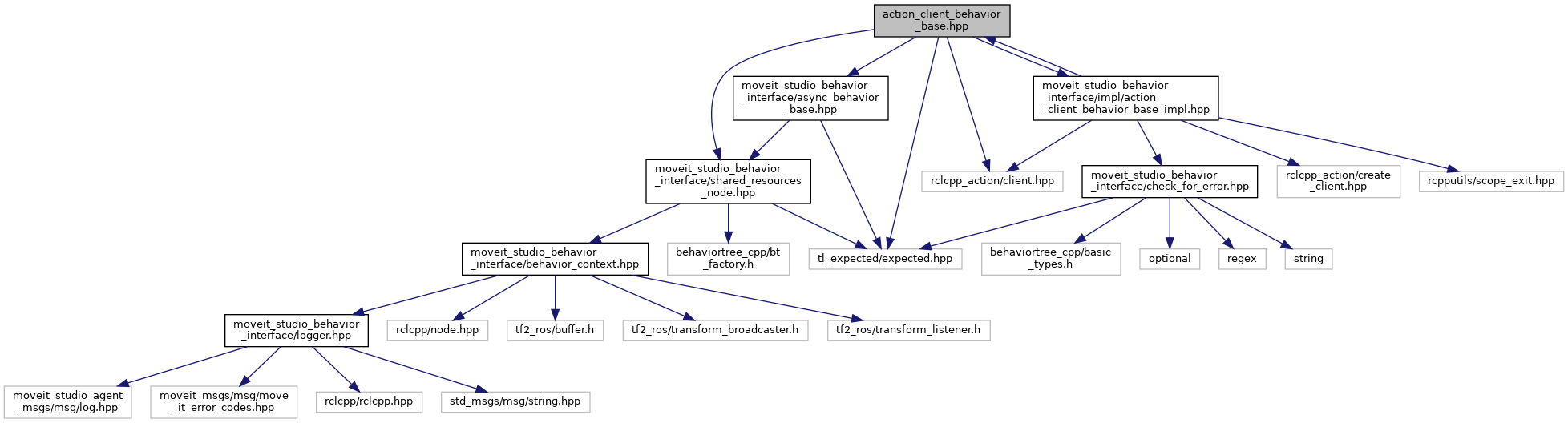
#include <moveit_studio_behavior_interface/async_behavior_base.hpp>#include <tl_expected/expected.hpp>#include <moveit_studio_behavior_interface/shared_resources_node.hpp>#include <rclcpp_action/client.hpp>#include <moveit_studio_behavior_interface/impl/action_client_behavior_base_impl.hpp>
Include dependency graph for action_client_behavior_base.hpp:
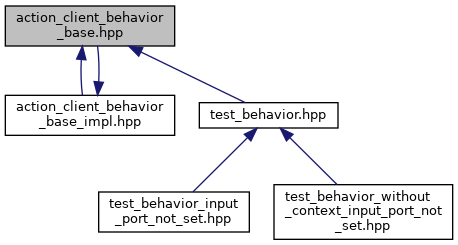
This graph shows which files directly or indirectly include this file:
Classes | |
| class | moveit_studio::behaviors::ActionClientBehaviorBase< ActionT > |
| A base class for behaviors which need to send a goal to a ROS action client and wait for a result. If the behavior is halted before the action result is received, the action goal will be canceled. More... | |
| class | moveit_studio::behaviors::ActionClientBehaviorBase< ActionT >::ClientInterfaceBase |
| Provides an interface to an action client that can handle a single goal at a time. More... | |
| class | moveit_studio::behaviors::ActionClientBehaviorBase< ActionT >::RclcppClientInterface |
| Implements ClientInterfaceBase for the rclcpp action client. More... | |
Namespaces | |
| moveit_studio | |
| moveit_studio::behaviors | |
Functions | |
| bool | moveit_studio::behaviors::clientMustBeRecreated (const std::shared_ptr< rclcpp_action::ClientBase > &client, const std::string_view old_action_name, const std::string_view new_action_name) |
| Compare an action client's current configuration to the desired new configuration to determine if the client needs to be recreated. More... | |