|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include "cartesian_planning/trajectory_utils.hpp"#include "moveit_pro_base/trajectory_processing/trajectory_tools.hpp"#include "moveit_pro_macros/macros.hpp"#include <fmt/format.h>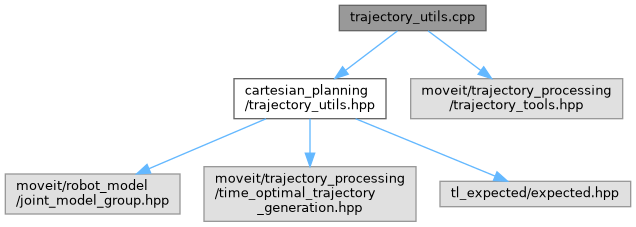
Namespaces | |
| namespace | cartesian_planning |
Functions | |
| tl::expected< moveit_pro::base::trajectory_processing::Trajectory, std::string > | cartesian_planning::createTrajectoryFromWaypoints (const std::vector< Eigen::VectorXd > &waypoints, const Eigen::VectorXd &max_joint_velocities, const Eigen::VectorXd &max_joint_accelerations, const double velocity_scale_factor, const double acceleration_scale_factor) |
Create a trajectory from a list of waypoints using the trajectory_processing library. | |
| tl::expected< trajectory_msgs::msg::JointTrajectory, std::string > | cartesian_planning::createTrajectoryFromWaypoints (const moveit_pro::base::JointModelGroup &group, const std::vector< Eigen::VectorXd > &waypoints, const double velocity_scale_factor, const double acceleration_scale_factor, const int sampling_rate) |
| Create a trajectory message from a list of waypoints. | |
| tl::expected< void, std::string > | cartesian_planning::appendToTrajectoryMessage (const std::vector< std::string > &joint_names, const moveit_pro::base::trajectory_processing::Trajectory &trajectory, int sampling_rate, trajectory_msgs::msg::JointTrajectory &trajectory_msg) |
Sample a moveit_pro::base::trajectory_processing::Trajectory at a frequency, and append to a JointTrajectory message. | |