|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include "moveit_pro_behavior/behaviors/visualization/ros_publisher_handle.hpp"#include <rclcpp/qos.hpp>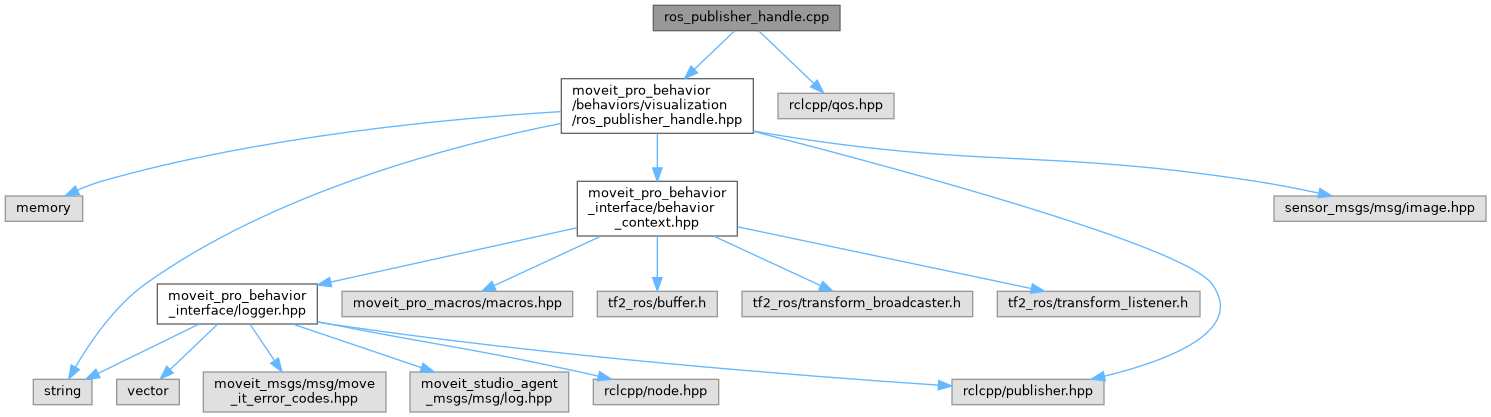
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |