|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <array>#include <filesystem>#include <future>#include <memory>#include <string>#include <vector>#include <moveit_pro_behavior_interface/async_behavior_base.hpp>#include <moveit_pro_ml/onnx_l2g.hpp>#include <tl_expected/expected.hpp>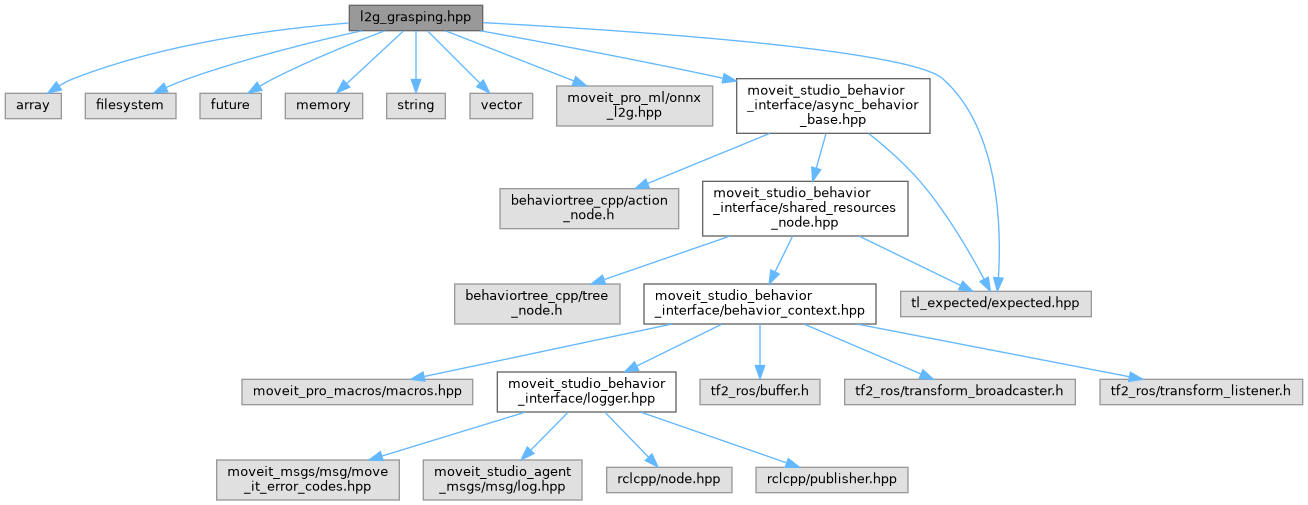
Classes | |
| class | moveit_pro::behaviors::GetGraspPoseFromPointCloud |
Infer a parallel jaw grasp pose from point cloud of an object. Details of the machine learning model can be seen at https://github.com/antoalli/L2G The point cloud of the object to grasp is given through point_cloud. No inference of what the point cloud represents is done, nor any notion of collision checking. Only the points of the object to be grasped should be given. The point cloud should approximately fit in a 0.22 meter cube. number_of_grasps_to_return is a simple clamping and the model is always inferring a fixed number, which is about 50. model_path locates the .onnx file of the model weights. If model_package is specified, model_path will be assumed relative to its directory. grasps are the poses of the closed end effector tip. They are not sorted by quality and require feasibility and collision checking. More... | |
| struct | moveit_pro::behaviors::GetGraspPoseFromPointCloud::InferenceHandle |
| Allows different models to be used with behavior. More... | |
| struct | moveit_pro::behaviors::GetGraspPoseFromPointCloud::L2GHandle |
| Uses L2G for grasp inference. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |