|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include "geometry_msgs/msg/pose_stamped.hpp"#include "rclcpp/publisher.hpp"#include "behaviortree_cpp/action_node.h"#include "behaviortree_cpp/bt_factory.h"#include "moveit_pro_behavior/utils/generate_vacuum_grasp_pose.hpp"#include "moveit_pro_behavior_interface/behavior_context.hpp"#include "moveit_pro_behavior_interface/shared_resources_node.hpp"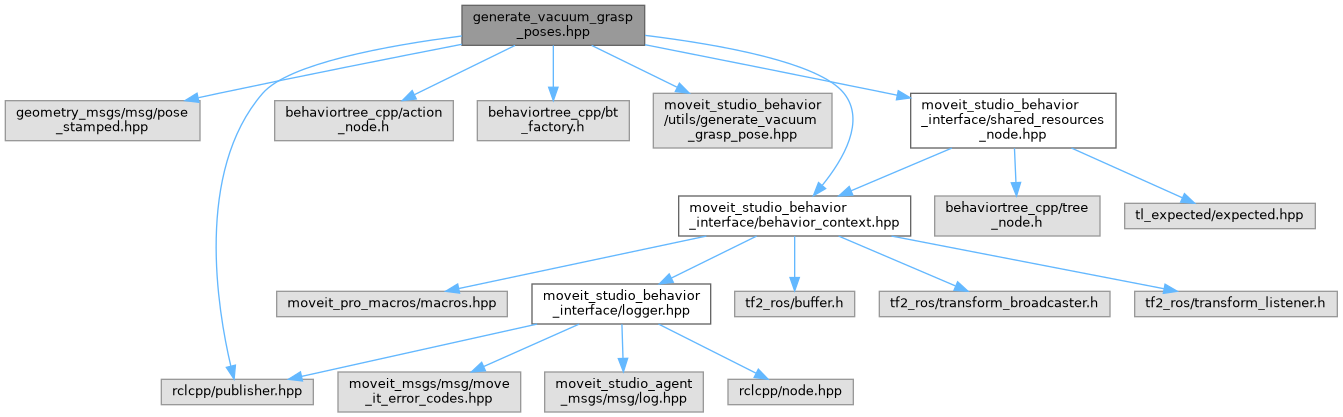
Classes | |
| class | moveit_pro::behaviors::GenerateVacuumGraspPoses |
| Given a target GraspableObject and planning details about the arm, generate grasp poses. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |