|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <control_msgs/action/follow_joint_trajectory.hpp>#include <moveit_pro_behavior/utils/trajectory_execution_pipeline.hpp>#include <moveit_pro_behavior_interface/async_behavior_base.hpp>#include <moveit_pro_behavior_interface/shared_resources_node.hpp>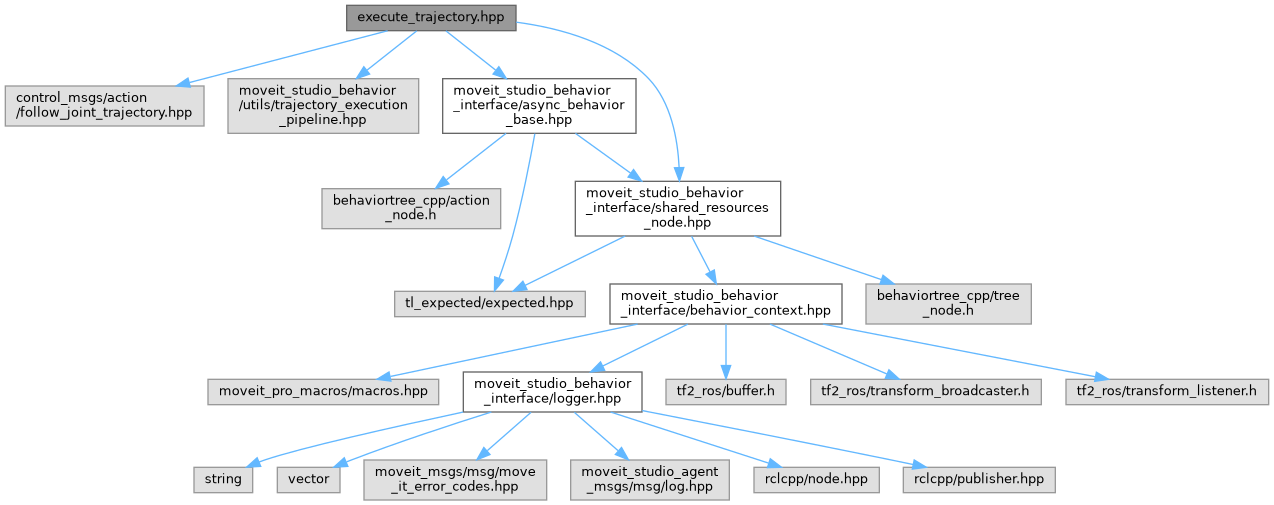
Classes | |
| class | moveit_pro::behaviors::ExecuteTrajectory |
| Accepts a JointTrajectory message via an input data port, and executes it by sending a goal to either a standard FollowJointTrajectory action server (JTC) or a Joint Trajectory Admittance Controller (JTAC) action server, depending on the value of the execution_pipeline input port. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |