|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <geometry_msgs/msg/pose_stamped.hpp>#include <moveit_msgs/msg/collision_object.hpp>#include <moveit_pro_behavior_interface/async_behavior_base.hpp>#include <sensor_msgs/msg/point_cloud2.hpp>#include <tl_expected/expected.hpp>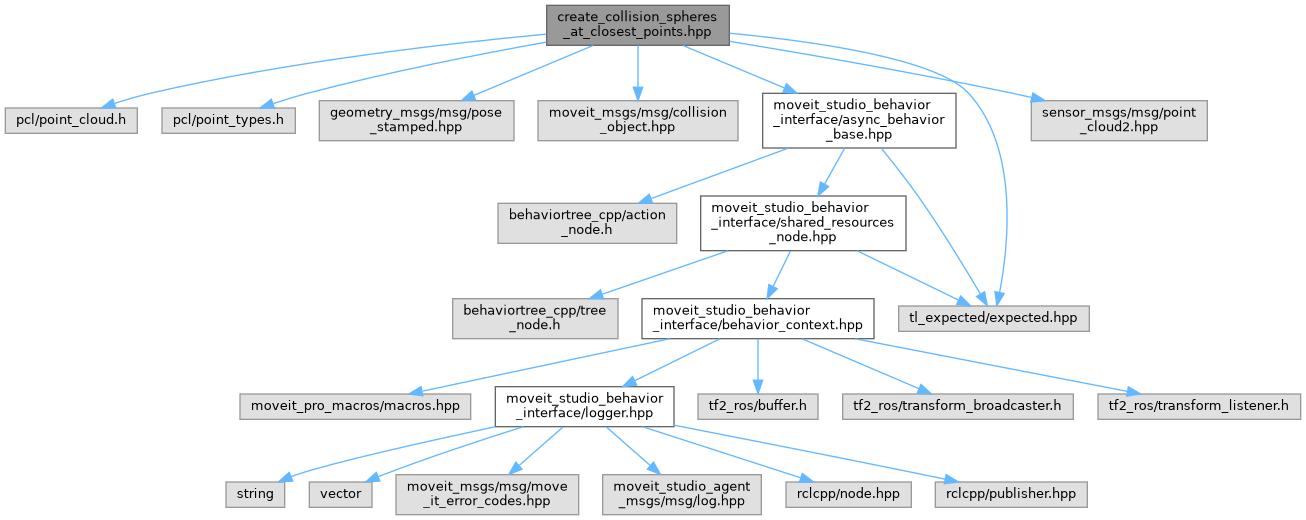
Classes | |
| class | moveit_pro::behaviors::CreateCollisionSpheresAtClosestPoints |
This behavior receives point cloud data, filters points inside a cylinder around a reference point, and creates a sphere at each of the closest points within the cylinder. The spheres are returned as a moveit_msgs::msg::CollisionObject message. More... | |
Namespaces | |
| namespace | moveit_pro |
| namespace | moveit_pro::behaviors |