|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
|
MoveIt Pro API
Core Behaviors for MoveIt Pro
|
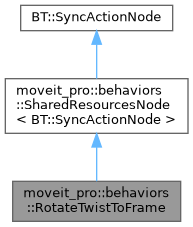
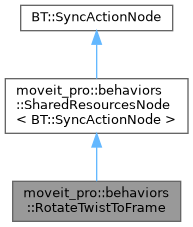
Rotates a stamped twist into a different frame's orientation. More...
#include <rotate_twist_to_frame.hpp>
Public Member Functions | |
| RotateTwistToFrame (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) | |
| Constructor for RotateTwistToFrame behavior. | |
| BT::NodeStatus | tick () override |
 Public Member Functions inherited from moveit_pro::behaviors::SharedResourcesNode< BT::SyncActionNode > Public Member Functions inherited from moveit_pro::behaviors::SharedResourcesNode< BT::SyncActionNode > | |
| SharedResourcesNode (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &behavior_context) | |
| Constructor for SharedResourcesNode. Called by BT::BehaviorTreeFactory when creating a new behavior tree containing this node. | |
| const std::shared_ptr< BehaviorContext > & | getBehaviorContext () const |
Static Public Member Functions | |
| static BT::PortsList | providedPorts () |
| static BT::KeyValueVector | metadata () |
Rotates a stamped twist into a different frame's orientation.
Re-expresses the linear and angular components of the input twist in the target frame's basis using cartesian_planning::twistRotationMatrix. Only the rotation part of the source-to-target transform is applied; any translation between the two frames is ignored, so this Behavior does not add the omega-cross-r reference-point shift that a full rigid-body twist transform would. This matches the common case of remapping a velocity command between frames without changing what point on the body is being commanded.
TF lookup uses tf2::TimePointZero (latest available transform); the input twist's header.stamp is intentionally ignored, since twists are typically control signals rather than measurements with a meaningful timestamp.
Returns FAILURE on a missing TF lookup (with the source / target frame names in the error message), or when required ports are missing.
| Data Port Name | Port Type | Object Type |
|---|---|---|
| twist_in | input | geometry_msgs::msg::TwistStamped |
| target_frame_id | input | std::string |
| twist_out | output | geometry_msgs::msg::TwistStamped |
| moveit_pro::behaviors::RotateTwistToFrame::RotateTwistToFrame | ( | const std::string & | name, |
| const BT::NodeConfiguration & | config, | ||
| const std::shared_ptr< BehaviorContext > & | shared_resources | ||
| ) |
Constructor for RotateTwistToFrame behavior.
| name | Name of the node. Must match the name used for this node in the behavior tree definition file (the .xml file). |
| config | Node configuration. Only used here because BehaviorTree.CPP expects the constructor signature with name and config first before custom constructor parameters. |
| shared_resources | Provides access to common resources such as the node handle and failure logger that are shared between all the behaviors that inherit from moveit_pro::behaviors::SharedResourcesNode. |
|
static |
|
static |
|
override |