|
| | AddCollisionObject (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| |
| | AddCollisionObject (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources, std::unique_ptr< PlanningSceneBridge > bridge) |
| |
| | AddCollisionObjectBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| |
| | AddCollisionObjectBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources, std::unique_ptr< PlanningSceneBridge > bridge) |
| |
| | ~AddCollisionObjectBase () override=default |
| |
| | AsyncBehaviorBase (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &shared_resources) |
| |
| | ~AsyncBehaviorBase () override=default |
| |
| BT::NodeStatus | onStart () override |
| | Required implementation of BT::StatefulActionNode::onStart().
|
| |
| BT::NodeStatus | onRunning () override |
| | Required implementation of BT::StatefulActionNode::onRunning().
|
| |
| void | onHalted () override |
| | Required implementation of BT::StatefulActionNode::onHalted().
|
| |
| void | resetStatus () |
| | Resets the internal status of this node.
|
| |
| virtual tl::expected< void, std::string > | doHalt () |
| | Optionally implement additional work needed to cleanly interrupt the async process.
|
| |
| void | notifyCanHalt () |
| | Called when runAsync() finishes to notify onHalted() that the async process has finished.
|
| |
| | SharedResourcesNode (const std::string &name, const BT::NodeConfiguration &config, const std::shared_ptr< BehaviorContext > &behavior_context) |
| | Constructor for SharedResourcesNode. Called by BT::BehaviorTreeFactory when creating a new behavior tree containing this node.
|
| |
| const std::shared_ptr< BehaviorContext > & | getBehaviorContext () const |
| |
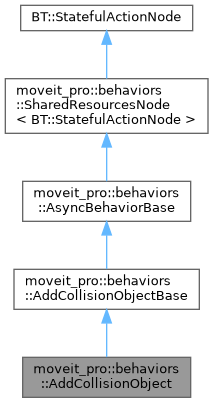
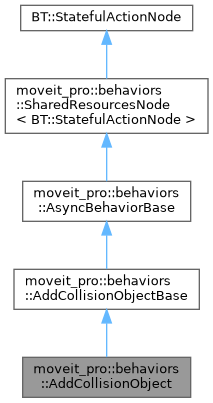
Adds a user-supplied CollisionObject to the planning scene.
Reads a CollisionObject from the collision_object input port and adds it to a planning scene. By default the Behavior modifies the live planning scene via service calls. Wire the planning_scene port to modify a supplied moveit_msgs::msg::PlanningScene message instead; the modified scene is written back to the same port and no services are called. See AddCollisionObjectBase for details on the two modes and the overwrite port semantics.
Returns FAILURE when the collision_object input port is not set, when id is empty, when header.frame_id is empty, when subframe_names.size() != subframe_poses.size(), when overwrite=false and a world entry with the same id is already present, when an entry with the same id is currently attached to the robot, or when a required service call fails in live scene mode.
| Data Port Name | Port Type | Object Type |
| collision_object | input | moveit_msgs::msg::CollisionObject |
| overwrite | input | bool |
| planning_scene | bidirectional | moveit_msgs::msg::PlanningScene |
 Public Member Functions inherited from moveit_pro::behaviors::AddCollisionObjectBase
Public Member Functions inherited from moveit_pro::behaviors::AddCollisionObjectBase