Planning And Control Troubleshooting
Unclear reason for failure of PlanMTCTask motion planning Behavior
Problem: My PlanMTCTask Behavior fails with error code PLANNING_FAILED.
Solution: Activate MoveIt Studio's solution instrospector by clicking the bug icon on the PlanMTCTask node in the Behavior Tree to inspect each stage's solutions/lack of solutions and better understand the nature of the failure. If you are already familiar with the Rviz Motion Planning Tasks plugin you can also use it by launching the Developer RViz configuration:
moveit_pro rviz
Unclear planning scene state
Problem: I am unclear about the the current state of the planning scene.
Solution: Launch the Developer RViz configuration and use the Planning Scene widget view the scene robot and geometry used by MoveIt:
moveit_pro rviz
Robot is stuck in collision
Problem: The robot arm got into collision during jogging-based teleoperation and the robot cannot be moved.
Solution: To resolve the collision, use MoveIt Pro's Jog Collision Checking to carefully disable collision checking and jog the arm out of the collision.
You must restart MoveIt Pro for these changes to take effect.
Joint jog + and - buttons don't work
Problem: In version 9.0 MoveIt Servo was replaced by the Joint Velocity Controller. The joint jog buttons rely on this controller to incrementally move the robot.
Solution: To restore functionality, add the Joint Velocity Controller discussed in the 9.0 migration guide.
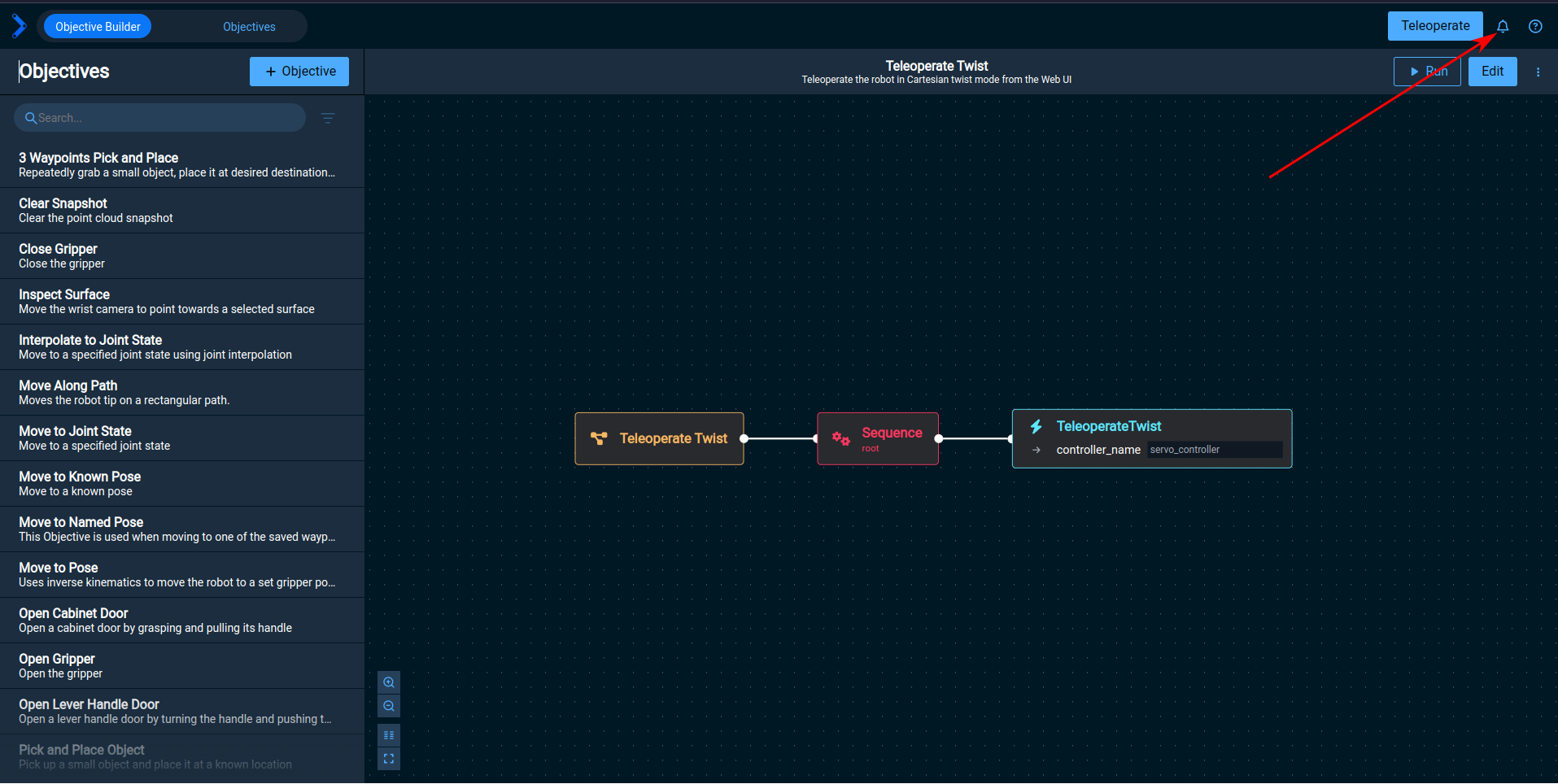
Missing Info messages in the UI
Problem: I am not seeing logged messages published at the Info level appear as a "Toast" message in the top right corner of the UI:
I have a line in my custom Behavior
shared_resources_->logger->publishInfoMessage(...);that I expect to run but I don't see the logged message coming through in the UI.
Solution: Change the log level output in the UI by pressing the log level bell icon in the top right corner of the UI and checking the info level box.

Joint values cannot be copied from joint jog panel
Problem: When I attempt to copy joint values from the joint jog panel in MoveIt Studio, I see the following message in MoveIt Studio:
Text cannot be copied over an insecure (non-HTTPS) connection.
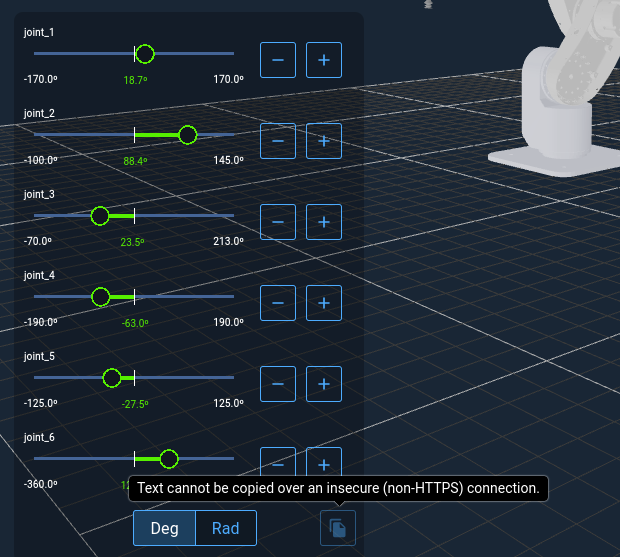
Solution: If possible, access MoveIt Studio in your browser via localhost and not an IP address.
Multi-machine Solution: Since most distributed systems using MoveIt Pro are on a closed network, the web-based user interface is hosted as an insecure connection without HTTPS. Browsers may attempt to enforce various protection strategies from insecure connections, such as prevention of text copying. To enable all features of the user interface, make sure to allow insecure connections in your browser settings. When running MoveIt Pro locally, you can set Chrome to allow insecure connections from local hosts. However, on a multi-machine set-up the web UI is hosted at a separate IP address and Chrome may not be as permssive. Allow insecure connections, by clicking on the title bar and selecting "allow insecure connections".
Docker compose returns an error requiring unique items
Problem: When I attempt to start a docker service using docker compose (for example docker compose exec dev bash), I see the following error:
validating /home/user_ws/docker-compose.yaml: services.agent_bridge.device_cgroup_rules array items[0,2] must be unique
Solution: Make sure you are using the same docker-compose.yaml as MoveIt Pro to start the service.
Details: The docker-compose.yaml in your user workspace requires a unique definition for each service the MoveIt Pro Developer Platform uses (without duplicates on later versions of MoveIt Pro and docker-compose). If you attempt to start a different service with a name that is currently in use (such as docker compose exec dev ... while MoveIt Pro is running) you will see an error like this.
The moveit_pro run command loads your MoveIt Pro configuration before starting the docker services, so running docker compose without all the configuration parameters defined in your environment will result in a different service than one that was started with moveit_pro.
If you redefine some parameters in the user workspace docker-compose.yaml, such as cgroup rules, an error will also occur.
We recommend first removing any erroneous duplicated service definitions from the docker-compose.yaml and then utilizing moveit_pro shell or moveit_pro dev to enter a shell within the MoveIt Pro container, which can help prevent some such errors from occurring.
Note: If you use moveit_pro configure to change your user workspace while MoveIt Pro is running, moveit_pro shell may return this error.
The robot I see with moveit_pro rviz does not match the robot in the Visualization panel on the web interface
Problem: Using RViz I see a different robot (or robot configuration) than the one I see in the MoveIt Pro web UI
Solution: Make sure your configuration package's config.yaml uses the same URDF as the robot_state_publusher.
Details: When setting launch_robot_state_publisher: False in config.yaml MoveIt Pro will expect the node to be launched by another process. It is the responsibility of that process to load the same URDF as the one given to MoveIt Pro. In config.yaml, ensure that the following lines point to the same URDF used by the robot_state_publisher node (note that the SRDF and URDF may be in two separate repositories if needed):
# Parameters used to configure the robot description through XACRO.
# A URDF and SRDF are both required.
# [Required]
robot_description:
urdf:
package: "<ROBOT_DESCRIPTION_PACKAGE>"
path: "description/my_robot.xacro"
srdf:
package: "<MOVEIT_PRO_CONFIGURATION>"
path: "config/moveit/my_robot.srdf"
# Specify any additional parameters required for the URDF.
# They will pe passed to the URDF xacro as arguments
# [Optional]
urdf_params:
- ip_address: "0.0.0.0"
- additional_arguments: "example_arg"
Semantic description is not specified for the same robot as the URDF
Problem: During MoveIt Pro startup, you see error messages like:
Error: Semantic description is not specified for the same robot as the URDF
at line 681 in ./src/model.cpp
This error appears in multiple components including move_group, waypoint_manager_node, and objective_server_node_main.
Solution: This error occurs when the robot name specified in your SRDF file doesn't match the robot name specified in your URDF file. To fix this issue:
-
Verify the robot names match:
- Open your URDF file and look for the
<robot name="...">tag - Open your SRDF file and look for the
<robot name="...">tag - Ensure both files specify the exact same robot name
- Open your URDF file and look for the
-
Fix the mismatch:
- Update either the URDF or SRDF file so both have identical robot names
- The robot name is case-sensitive and must match exactly
Joint Singularities
Robot Begins in Singularity
Problem: Many robot arms are in a joint singularity when all their joint angles are 0. As a result, if a simulated robot arm's joint states are not modified from uniform 0's, you may see warnings telling you that the robot is close to a singularity or collision and the robot may have slow pose jogging or no pose jogging at all.
Solution: To remedy this, you should add a default keyframe and modify the joint states to some that do not cause a singularity. For more information on how to accomplish this, see Configuring Robot Keyframes.
Robot Enters a Singularity
Problem: Sometimes when joint jogging, the robot may enter a joint singularity. This will make pose jogging impossible, and the UI will tell you that the robot is near collision or singularity.
Solution: Singularities occur when some joints on your arm are coaxial in a way that reduces the degrees of freedom of the robot. Some examples for a 6-DoF robotic arm may be seen in this short video. To remedy this state, joint jog the robot to a different joint state that is out of singularity. Once the robot is out of singularity, you should be able to pose jog as normal.
Real-Time Control
Arm movements have noticeable hitches and jitter in real-time setup
Problem: When running MoveIt Pro drivers container in real-time on hardware (such as x86/Intel or ARM/Nvidia Jetson platforms), arm motions show noticeable hitches and jitter that can be seen and felt during movement, even with real-time kernel and priority settings configured.
Solution: See the dedicated Real-time Performance and Trajectory Jitter Troubleshooting guide for detailed solutions addressing both real-time performance issues and trajectory configuration problems.
MoveGripperAction Fails to Reach Target Position
Problem: When commanding my 2 finger gripper to close via the MoveGripperAction Behavior, the command times out and an error toast displays "MoveGripperAction Error" "The gripper failed to reach the target position within the specified timeout".
Solution: The solution is one of the following, depending on your use case:
-
Configure and tune gripper stalling by modifying your
config.yamlros2_control.configcontroller configuration for the GripperActionController. Use PlotJuggler to determine thestall_velocity_thresholdas seen below.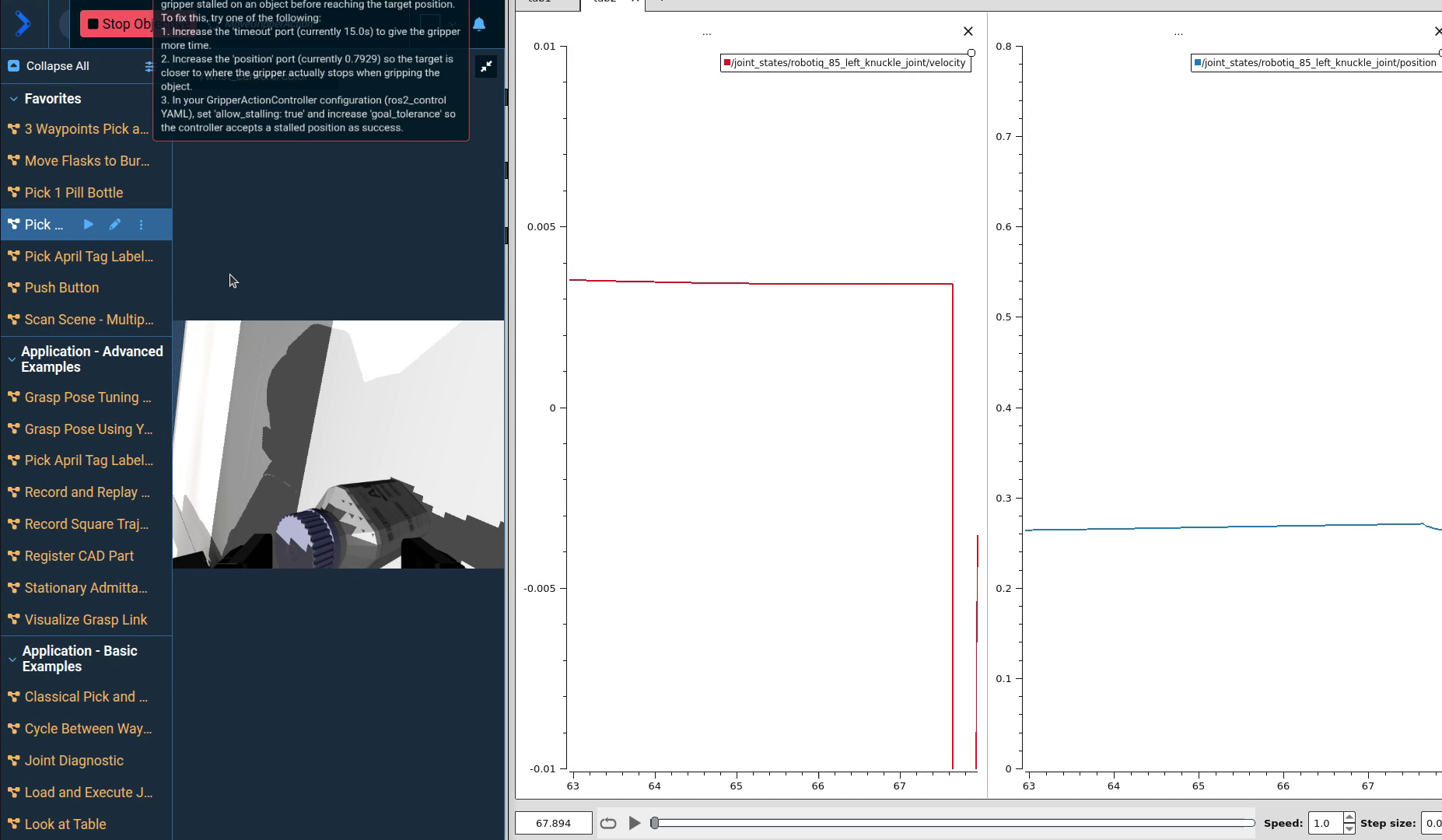
robotiq_gripper_controller:
ros__parameters:
default: true
joint: robotiq_85_left_knuckle_joint
allow_stalling: true
stall_timeout: 0.05
stall_velocity_threshold: 0.004
goal_tolerance: 0.02 -
If you DO know the size of the object you are trying to grasp, adjust your
positionport to match your gripper's position value when it has a firm grasp. -
Consider increasing the
MoveGripperActiontimeoutto give your gripper more time.